 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Agent Architecture Description in UML |
|
|
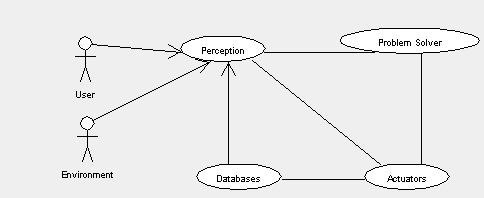
| From the problem solving point of view, in this work we refer to the architecture of Figure 1.� In this structure it's possible to devise three main components: the perception,, which is responsible to map the stream of raw data in a symbolic form, that in turn is provided to the problem solver component where the symbolic data computation and, in general, deliberative behaviors of the system are located. The problem solver part can also support perception with some hints aimed to refine the perceptive process, and focus the attention on those external stimuli that are judged to be more useful for the current task completion. The third component is the actuation one, which communicates with the other two, in order to drive the forest database during perception tasks, and in read and write focusing. |
|
|
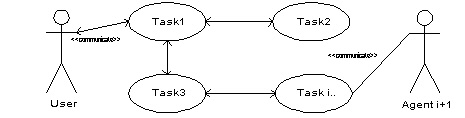
| The perception-action link allows also reactive behaviors.� Some of the authors already presented this architectural structure (Saarenmaa et al. 1994; Benjamin and Fensel, 1998). Its main goal is to go beyond the classical behavior-based model, and to provide the databases with true 'symbol grounding' capabilities due to the intermediate representation of perceptor data, that is used to instantiate pieces of knowledge at the symbolic component. Through this mechanism the software agent is able to act in a deliberative fashion more effectively. The aim of this work is to provide a framework for our architecture allowing us to define a rigorous design methodology relying on the agent-based software paradigm. In particular, the scheme reported in Figure 1 can be regarded as a categorization of the possible agents typologies both if we look at the single software agent architecture and if we consider a multi-agent scenario. In the second case we address the interaction between the external actors, and the whole team in order to perform cooperative tasks. In other words figure 1 is the highest level of abstraction in the system design, without taking into consideration the implementation details. Our approach suggests a possible abstraction from the single software agent architecture to a multi agent team: the software agent that is itself a multi-agent system, can be viewed as a single agent in the multi agent context in which it cooperates with the others in order to reach the goals of the entire system. Each software agent can be thought as containing several agents; some of them interact with the external environment, some others process the knowledge to plan a strategy of reaching the goal, and at the end, other agents issue commands to the databases. At the same time it is also possible to zoom in the single software agent representation and to see it as composed of several agents logically classifiable in the same three types (Perception, Problem Solver and Actuator). Furthermore we can zoom in each single agent and find a perception capability (necessary to be aware of the external environment), a problem solver part (where the knowledge is processed) and some actuator features (to realize the decisions taken in order to reach the goal). It is simple to identify these elements in a domain agent. It accesses to a knowledge base using the belief generators or through some kind of interaction with another agent (for example a message exchange), it processes the knowledge base accordingly to its objective and at the end it communicates the result to one or more agents interested in further steps. In our evaluations we refer to the FIPA (Foundation for Intelligent Physical Agents) architecture (FIPA, 1998). In this approach, each agent is composed by a colony of tasks as described in Figure 2 and can play different roles that can be put into relation with one of the three areas reported in the general architecture of Figure 1. We suppose that there is a one-to-many relation between each one of these three areas and the agents of the system as depicted in Figure 2. |
|
|
|
 |
|
|
|
Figure 1:�� The FORMAP agent architecture from problem solving point of view |
|
|
|
 |
|
|
|
Figure 2: The internal structure of the agent |
|
|
|
Back to Main Page |
|