El
problema principal que las empresas interesadas en automatización vieron con
Ethernet era que tenían serias dudas sobre su aplicación a sistemas en tiempo
real. Las razones principales eran, por un lado, el comportamiento no
determinista de Ethernet, donde cabía la probabilidad de que dos nodos no
pudieran comunicarse debido al exceso de tráfico y, por otro, que no era
posible reservar capacidad o establecer prioridades.
Token
Ring resolvía muchos de estos problemas, pero seguía presentando dos serios
problemas: el papel de la estación monitor resultaba demasiado importante y una
topología física bus era más adecuada que un anillo para una línea de
producción de una fábrica. General Motors promovió entonces el desarrollo del
estándar 802.4 o Token Bus, que es una red que se utiliza en algunas fábricas
para el control de la maquinas.
Cabe
señalar que su uso es mucho más restringido que Ethernet o Token Ring, y en
palabras simples, y sin cometer grandes errores, se puede decir que Token Bus es
una mezcla entre Ethernet y Token Ring.
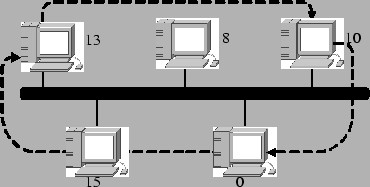
En
esta técnica las estaciones del bus o árbol forman un anillo lógico; es
decir, a las estaciones se les asigna una posición lógica en una secuencia
ordenada y circular. Cada estación conoce la identidad de su estación
antecesora y de su sucesora en el anillo lógico. La ordenación física de las
estaciones en el bus es irrelevante e independiente de la ordenación lógica.
En
la Figura siguiente se muestra un ejemplo de esta técnica. Las estaciones B, C
y D están inscritas en el anillo lógico por donde circula el testigo; por
tanto, pueden enviar y recibir información. Las estaciones A y E están
excluidas y no pueden enviar información; sin embargo, pueden seguir recibiéndola
gracias a las características de la topología en bus.
![]()