 Started out using Lego Technic kit Tread Trekker. This was fun because changes were easy to implement. Not only that, but I could get a feel for the speed of servo motors. They were way too slow (very high power though) for what I wanted so I moved up to bigger DC gear head motors. The servos I used where modified S148 Futaba brand. I bypassed the PLL since I was using an H-Bridge driver anyway. |
|---|
 |
 |
 |
 |
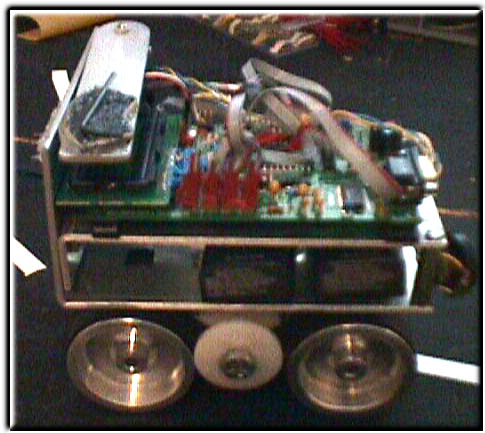 A somewhat grainy picture of Prodigy Jr.
From top to bottom we have, the Motorola HC12EVB, the two Sony InfoLithium batteries, and the modular caterpillar drive unit. The drive unit consists of custom
machined wheels (thanks Barry and Rick) mounted in a rigid aluminum channel. The aluminum wheels are attached to two DC gear head motors and
two 1000 pulse-per-rev encoders directly and held to the shaft with set screws. Ordinary vacuum cleaner belts act as treads. A somewhat grainy picture of Prodigy Jr.
From top to bottom we have, the Motorola HC12EVB, the two Sony InfoLithium batteries, and the modular caterpillar drive unit. The drive unit consists of custom
machined wheels (thanks Barry and Rick) mounted in a rigid aluminum channel. The aluminum wheels are attached to two DC gear head motors and
two 1000 pulse-per-rev encoders directly and held to the shaft with set screws. Ordinary vacuum cleaner belts act as treads. 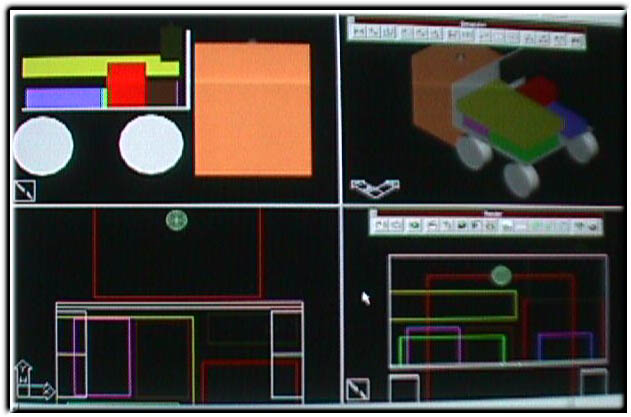 Prodigy Jr. was originally designed for the IEEE SEC'99
hardware competition. Since I funded the robot, I kept it. It did not do very well in the competition (12 out of 19) but I learned volumes from the experience.
I will share these lessons when I get a chance :) In this photo, you can see a CAD representation of one of the obstacles Prodigy Jr. was originally designed for the IEEE SEC'99
hardware competition. Since I funded the robot, I kept it. It did not do very well in the competition (12 out of 19) but I learned volumes from the experience.
I will share these lessons when I get a chance :) In this photo, you can see a CAD representation of one of the obstacles
|
Page last updated on:3/22/2002 2:17PM