Welcome to the University of Memphis
Student IEEE Hardware Team's Page
The UofM SouthEastCon'98 Hardware Entry
MANI Mouse
Miniature Autonomous Navigational Intelligent [Mouse]
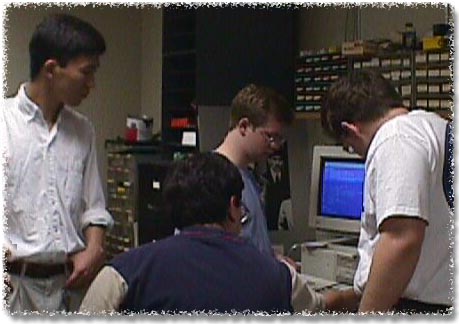
Here are the ones responsible for designing and constructing MANI...
 they are (from left to right) Zhou Chen, Steven Aronson, Mickey McQuade, and Jay Couture.
they are (from left to right) Zhou Chen, Steven Aronson, Mickey McQuade, and Jay Couture.
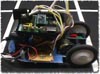 And heeeerrrrrreeeeee'sssss MANI
The actual rules for the competition can be found here, but you'll also have to read the FAQ 1 through 111 to understand the whole rules. Our design takes advantage of the small space between the outer walls and the outermost mines. There is a 4" gap and MANI is only 3.5".
And heeeerrrrrreeeeee'sssss MANI
The actual rules for the competition can be found here, but you'll also have to read the FAQ 1 through 111 to understand the whole rules. Our design takes advantage of the small space between the outer walls and the outermost mines. There is a 4" gap and MANI is only 3.5".
Here is a good  shot of what MANI does. And he does this very quickly. Based on the rules, the lights in the four corners will turn on in a random order. In our worst case scenario, it only takes MANI 53 seconds to complete the contest. Given a best case scenario he can complete it in 15 seconds. :)
shot of what MANI does. And he does this very quickly. Based on the rules, the lights in the four corners will turn on in a random order. In our worst case scenario, it only takes MANI 53 seconds to complete the contest. Given a best case scenario he can complete it in 15 seconds. :)
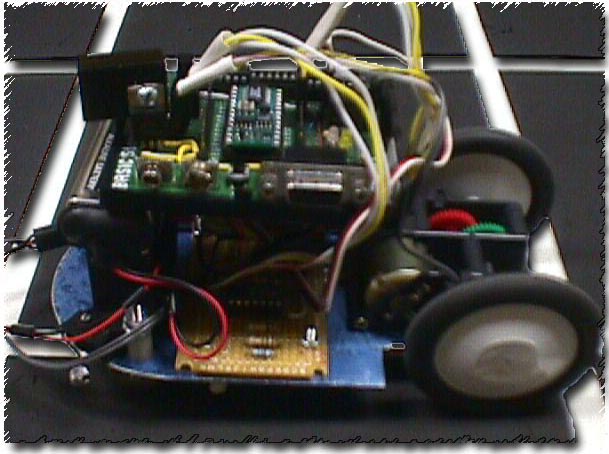
Here is how MANI operates. In this shot  you can see the line following circuit in the center. At the middle of the picture (actually MANI's left side) towards the left you can see the bump switch. Also in the middle in the center of the picture you can see the line counting sensor (it's the same sensor setup as the line follower).
you can see the line following circuit in the center. At the middle of the picture (actually MANI's left side) towards the left you can see the bump switch. Also in the middle in the center of the picture you can see the line counting sensor (it's the same sensor setup as the line follower).
Frequently Asked Questions
1. What microprocessor did you use and why?
A. We used a BASIC Stamp II from Parallax Inc. Why? Well we have used the Motorola 68HC11 in the past and we do have several EVBs to choose from, but size was an issue. Also, I'll pick BASIC over assembler any day for ease of programming/debugging. We knew our robot didn't need to be all that smart (we might have been able to do it using RC timers and a few digital counters) and none of us had use the Stamp before. I liked the stamp, but when GOSUBs are used, you pay a stiff penalty in performance. Still, I think I speak for the rest of the group when I say that we aren't through using the Stamp.
2. Don't you feel like you've cheated? Most everyone else followed the rules as they were meant.
A. Hell no. There are many different solutions to the same problem and many different schools of thought as to what is the best way to accomplish the task. We used a well know principle Keep It Simple Stupid ! And need I remind anyone, the car that won looked a lot like ours and used the same basic idea.
3. Did you buy your Robot as a kit?
A. No. Some of the components were bought, like the gearbox and rear wheels, but most of it was manufactured. The base, front wheels, line following circuit, motor control circuit, cables were made by us. But we do take the compliment that it looks bought :) I'd like to take this opportunity to thank Dan McQuade for help in manufacturing the base and finding a very slick solution as to how to mount the Stamp board.
4. I noticed at the competition that you guys had some nice T-shirts, are you selling them? How do you make them?
A. We don't have any plans to, but if we get enough requests we may be persuaded into it :) We used Photoshop, a Canon color printer, and a packet of iron-on transfers. Jay Couture created the graphic and Steven Aronson provided the printer.
5. How did you do?
A. We placed 5th due to a mechanical problem in the second round (our bump switch got hung on the wall). Check out the results. Our third round we had a record time of 15 seconds :)
Last update 4/18/03 2:21PM
 And heeeerrrrrreeeeee'sssss MANI
The actual rules for the competition can be found here, but you'll also have to read the FAQ 1 through 111 to understand the whole rules. Our design takes advantage of the small space between the outer walls and the outermost mines. There is a 4" gap and MANI is only 3.5".
And heeeerrrrrreeeeee'sssss MANI
The actual rules for the competition can be found here, but you'll also have to read the FAQ 1 through 111 to understand the whole rules. Our design takes advantage of the small space between the outer walls and the outermost mines. There is a 4" gap and MANI is only 3.5". 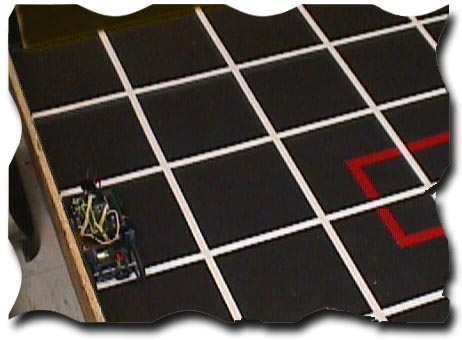 shot of what MANI does. And he does this very quickly. Based on the rules, the lights in the four corners will turn on in a random order. In our worst case scenario, it only takes MANI 53 seconds to complete the contest. Given a best case scenario he can complete it in 15 seconds. :)
shot of what MANI does. And he does this very quickly. Based on the rules, the lights in the four corners will turn on in a random order. In our worst case scenario, it only takes MANI 53 seconds to complete the contest. Given a best case scenario he can complete it in 15 seconds. :) 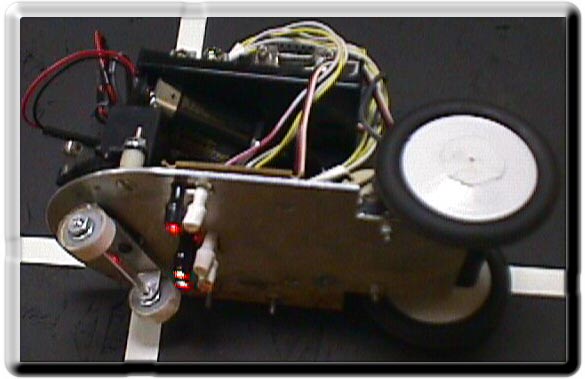 you can see the line following circuit in the center. At the middle of the picture (actually MANI's left side) towards the left you can see the bump switch. Also in the middle in the center of the picture you can see the line counting sensor (it's the same sensor setup as the line follower).
you can see the line following circuit in the center. At the middle of the picture (actually MANI's left side) towards the left you can see the bump switch. Also in the middle in the center of the picture you can see the line counting sensor (it's the same sensor setup as the line follower).