
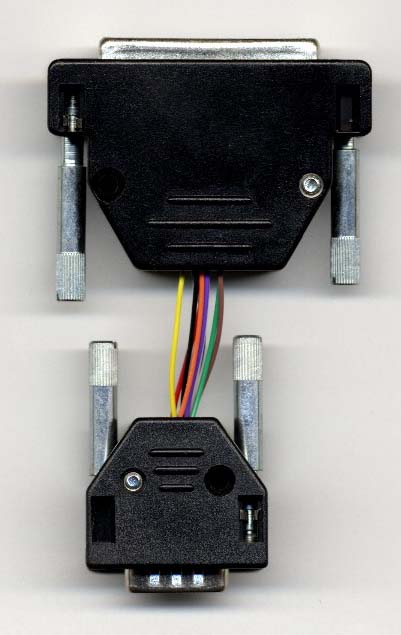
Toma general
:

Nota: el mío tiene un cable adicional (blanco) que conecta el metal de conector, esto lo suelen tener los cables de impresora de calidad.
 visitas
visitas
Necesitarás:
1 conector DB9 macho (130 pts aprox)
1 conector DB25 hembra (130 pts aprox)
No compres fundas para los conectores, no es necesario y te acabará
costando casi como uno original. Puedes enrollarlo en cinta aislante.
9 trozos de cable (de unos 5 o 6 cm bastará, yo los cogí
de un cable de impresora viejo, pero en cualquier tienda de electrónica
venden)
1 soldador (cuidado no te quemes) y estaño.
DB25 Hembra
13 <------- 1
_____________________________
\ o o o o o o o o o o o o o /
\ o o o o o o o o o o o o /
-------------------------
25 <----- 14
|
DB9 Macho
1 2 3 4 5
_____________
\ . . . . . /
\ . . . . /
---------
6 7 8 9
|
| DB-25 | Descripción | DB-9 | Conectado con el cable LEGO | |
| 2 | TD | Transmit Data | 3 | SI |
| 3 | RD | Receive Data | 2 | SI |
| 4 | RTS | Request to send | 7 | SI |
| 5 | CTS | Clear to send | 8 | SI |
| 6 | DSR | Data Set Ready | 6 | NO |
| 7 | SG | Signal Ground | 5 | SI |
| 8 | DCD | Data Carrier Detect | 1 | NO |
| 20 | DTR | Data Terminal Ready | 4 | NO (Conectado pero no usado) |
| 22 | Ring | Ring Indicator | 9 | NO |
NOTA: Los pins 1, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 21, 23,
24, 25 no son usados en DB25 serie.
Detalle de las soldaduras (algo traperillas pero son conductoras, nunca
había tocado un soldador y tampoco ha sido muy difícil, así
que no tengáis miedo):
Toma general
:
Nota: el mío tiene un cable adicional (blanco) que conecta el
metal de conector, esto lo suelen tener los cables de impresora de calidad.
Y ahora ponemos guapo al conector
:
Bueno pues ahora sólo queda probarlo, puedes comprobar las conexiones con un polímetro.
El cable de Lego sólo usa 5 pines que son el 2,3,5,7,8, el pin
4 está conectado aunque no se usa (¿se podría usar
para llevar la alimentación y reemplazar la pila de 9V?).
Así que si sólo lo quieres usar para tu RCX sólo haría
falta que conectases las filas que ponen SI.
| Cabecera 0x55 0xff 0x00 | Código de operación | Parámetros | Checksum |
El checksum es el byte menos significativo de la suma de bytes del paquete.
Realmente cada byte no perteneciente a la cabecera es se seguido de
su complementario, de esta forma el paquete contiene el mismo número
de 0's que de 1's, por lo que es más estable a variaciones de las
condiciones de iluminación.
Como respuesta se devuelve un paquete con el COP inverso. Si se repite un COP se opera con XOR 0x08.
Vamos a ver un ejemplo, queremos saber si el RCX está vivo y
la versión de la ROM y firmware del ladrillo.
| Operación | Código de operación | Datos | Código de respuesta | Datos de respuesta |
| Alive | 10/18 | nada | ef/e7 | nada |
| GetVersion | 15/1d | 1 3 5 7 b | ea/e2 | VersiónROM, VersiónFirm |
[root@localhost rcx]# xend 10
-> 55 ff 00 10 ef 10 ef 55 ff 00 // 10 // 10
<- 55 ff 00 ef 10 ef 10 55 ff 00 // ef // efComo nos ha dicho ef es que está bien
[root@localhost rcx]# xend 15 1 3 5 7 b
-> 55 ff 00 15 ea 01 fe 03 fc 05 fa 07 f8 0b f4 30 cf
55 ff 00 // 15 // 01 03 05 07 0b // 30
<- 55 ff 00 ea 15 00 ff 03 fc 00 ff 01 fe 00 ff 00 ff 00 ff 00 ff ee 11
55 ff 00 // ea // 00 03 00 01 00 00 00 00 // eeLa versíón ROM son 8 bytes 3.1 y la de firmware 0.0 (no había ninguno cargado).
Para aprender más Kekoa Proudfoot se lo ha currado y tiene una
lista de códigos de operación (www.graphics.stanford.edu/~kekoa/rcx/#Opcodes),
parte de esta información ha sido obtenida de
www.daimi.au.dk/dArkOS/Vaerktoejer.dir/RCX.vejledning.dir/Vejledning.html
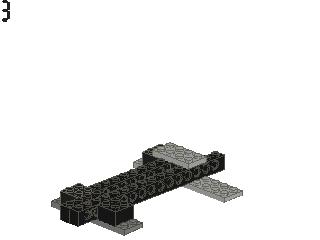
Bípedo: es uno de los más sencillos y eficientes que he
visto aunque arrastre los pies, por lo menos no se cae.
El fichero bipedo.zip
contiene "planos" en formato Ldraw, de todas formas con estas instrucciones
queda más claro
Las piezas planas largas (Plate 2x16) se pueden sustituir por 2, los
ladrillos de 6x2 se sustituyen por 2x2 + 4x2 y/o 2 de 1x6 con agujeros.
Aspecto final de la base:
Eje de balanceo
El extraño triángulo se puede hacer con dos "L"
la pieza horizontal que sostiene las patas por arriba se puede sustituir
por una más grande (Brick 16 with Holes).
la base de los pies se puede acortar un poco.


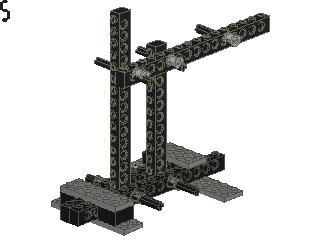
Las dobles presillas de los ejes no son necesarias, poniendo sólo
1 (que son las que tiene el RIS) queda seguro.
 Con el infrarrojos se conecta al PC y tachán, conexión a Internet.
Con el infrarrojos se conecta al PC y tachán, conexión a Internet.