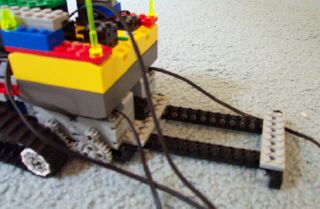
| After taking notice that real tanks have their treads slightly uplifted at the front, I decided to implement this into a Lego Mindstorms robot. Amazingly, the biggest task seemed to be to find a perfect fit for the 3 different hubs. Introducing a third hub caused alot of problems because it introduced considerably more friction. If you have the third hub to where it appears right, it will be too tight. Any lower and it will be way too slack. The solution came by accident. When I accidently put some of the pieces together wrong after a little changing, I realized that by sticking the beam with the third hub in it out farther away, and by using plates to slowly increment the height I would be able to find the perfect solution. And I did. The solution is to place the last hub 11 lego bricks away(from the first hub) and 3 lego bricks high(the beam the axle is in counting as the third lego brick high). Another thing worth mentioning is that I used 2 motors intstead of 1 to power each tread. Really, my main goal was to build a robot to scale objects higher than an "average" robot. Maybe the new design of treads helped, and maybe the extra motors helped, but what made it able to scale objects 1 3/4 inches high to a "normal" robot's 1 inch,(yes, I built a normal treaded robot and tested it) is its long beams sticking behind it. If it wasn't for these a "normal" treaded robot could climb objects higher than this robot. So my discovery is: To build an improved treaded robot, give it a long tail and a powerful mechanism(for climbing really high obstacles)which is not yet discoverd by me, to get the robot on top of objects(the long tail in the back will do the rest). Also, the bumper is not my design. It came from the book Building Robots with Lego Mindstorms. |