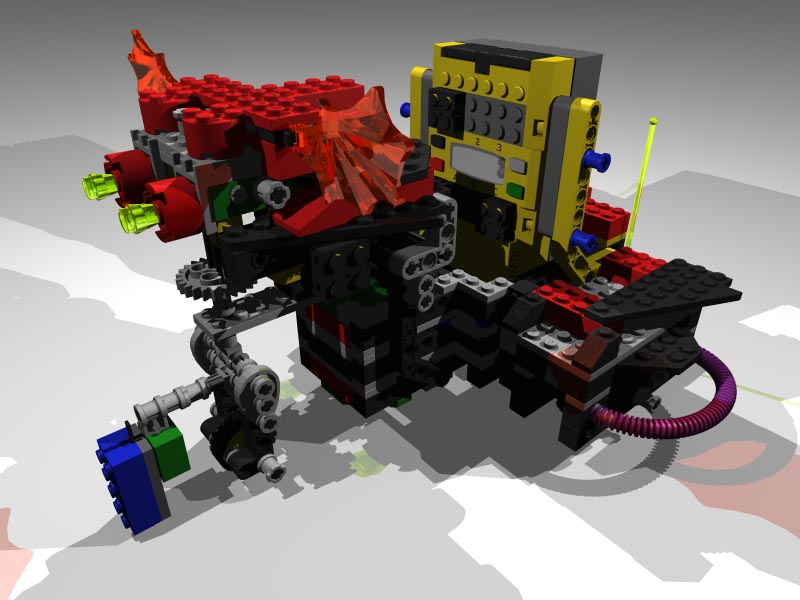
Despite its strange name and appearance, Grockle, as we will from now on call him, does a very �unstrange� thing-line following. Grockle is a mars-type theme robot made with pieces from the RIS and Exploration Mars Expansion Set. He is carefully designed and is split into 6 sub-assemblies. All the sub-assemblies are very easy to take off and put on. This is known as modularity. For instance, the left part with the wheel is one whole sub-assembly that can easily be pulled straight off and put back on with the greatest of ease via 2 black friction pegs and an axle extender that connects directly to the main driving axle. The whole robot is very robust and sturdy with hardly a single weak spot because I made durability a high priority.
One priority I had in mind was speed. Not the robot's general speed, but how fast it could follow a line. I used things like a tricycle drive, a differential for the main driving, and an advanced programming language to try and get the most out of Grockle. For fun and to see how they would measure up, I programmed Grockle in 3 different programming languages: RCX Code, NQC, and Lejos-a firmware replacement programming language based on Java. I made around 30 test runs and some calculations to figure out how fast Grockle really went. Here is the deal: The INSIDE of the test mat is approximately 5.15 feet long. I timed the robot as I ran it around the whole test mat 3 times for each programming language and then divided by the total time it took to do it by 3 to get the simple average. Here is how it looks:
RCX Code: 10.60 sec., 10.42 sec., 10.65 sec., Avg.= 10.56 sec.
NQC: 10.57 sec., 10.27 sec., 10.38 sec., Avg.= 10.41 sec.
Lejos: 12.41 sec., 11.99 sec., 12.09 sec., Avg.= 12.16 sec.
NQC topped them all! I thought Lejos would make the test mat in the best times because the replacement firmware has a faster sampling rate of the sensors but it didn�t! This is due probably to the fact that Lejos doesn�t have until statements. Until statements are excellent for line following which is why NQC did so well. Instead, in Lejos I had to substitute either nested if statements or while statements. I also calculated their speed in feet/second. Here they are:
RCX Code: .49 ft./sec.
NQC: .50 ft./sec.
Lejos: .42 ft./sec
Although Grockle is definitely not the fastest possible configuration, he is a good example of what can be done when you take a �normal� concept-such as line following- and give the robot an imaginative twist to its looks and in the way it solves a particular problem. Thank you for looking! |