Editor de código
| |
Editor de código |
||||
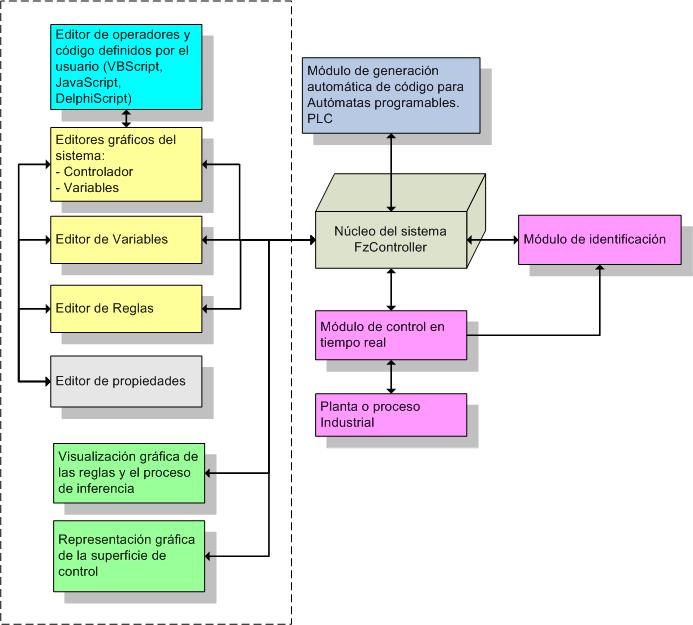
En este trabajo se muestran los primeros resultados obtenidos en el desarrollo del sistema FzController. Se expone el desarrollo software de un sistema que, no sólo permite el control en tiempo real de cualquier planta o proceso mediante un dispositivo de adquisición de datos, sino que constituye una herramienta de apoyo a la investigación, a la docencia y al desarrollo de controladores difusos. El sistema además presenta una herramienta para que el usuario pueda implementar sus propios operadores difusos en Java Script, VBScript, o Delphi Script.El módulo de generación o síntesis del código generado para Autómatas Programables (PLC) (que cumplan con el Estándar de programación IEC-61131-3) represemta su característica más distintiva.
|
||
Existen dos métodos básicos para implementar sistemas difusos, el exacto y el aproximado, cada uno con sus ventajas y desventajas. • Método exacto : El método exacto se basa en hacer un estudio de la forma que adopta el conjunto difuso ante cada uno de los operadores de implicación. Lo que se hace es una representación paramétrica de los conjuntos difusos inferidos. Este método tiene como inconveniente que hay que hacer un cálculo previo de las expresiones paramétricas de los conjuntos difusos antes de implementar el controlador. • Método aproximado : Al utilizar este método no hay que hacer ningún cálculo previo ya que se discretiza el universo de definición de cada una de las variables del consecuente en un número de puntos predefinido. Este es un método más lento desde el punto de vista computacional y la precisión está dada por la cantidad de puntos de discretización. Hay que llegar a una solución de compromiso entre la velocidad computacional y la exactitud. Tiene la ventaja de poder trabajar con mayor cantidad de operadores de implicación ya que no necesita hacer un estudio previo de las expresiones parametrizadas de los conjuntos difusos. [1] Tanto los operadores de implicación, agregación y desfusificación actúan sobre cada uno de los elementos de los vectores obtenidos como resultado del proceso de discretización. Para la implementación del sistema FzController se emplea el método aproximado. |
||
Diagrama general del sistema. |
||
Operadores conjunción (Conectivo AND) |
t-normas: |
Operadores de disyunción (Conectivo OR) |
s-normas: |
Operadores de Implicación |
Diene, Dubois and Prade, Mizumoto, Goguen, Golden, Lukasiewicz |
Operadores de agregación |
t-normas: |
Métodos de desdifusificación |
Centro de gravedad, Bisector, Media de máximos, Máximo menor, Máximo mayor, Suma de picos ponderada. |
Operadores implementados por defecto el sistema FzController.