PROJETO INTEGRADO
SISTEMA DE ABERTURA DE
PORTÕES SEMI-AUTOMÁTICO

EUGÊNIO BURG FILHO
HEVERTON IVAN DE SENE
PEDRO HENRIQUE MARCHESINI MULLER
RAFAEL PIZZAMIGLIO
PROFESSORES / ORIENTADORES:
GIL MARCOS JESS
AFONSO F. MIGUEL
RESUMO
Projeto desenvolvido como
conclusão do terceiro período do curso de Engenharia de
Computação da Pontifícia Universidade Católica do
Paraná, cuja afinidade é de demonstrar o funcionamento de um portão
e de uma porta eletrônica semi-automática. Baseado entre a
interação de um microcontrolador, servo motor e um programa
desenvolvido pelo próprio grupo. Através da interface
desenvolvida (software), entra-se com o(s) comando(s) onde o microcontrolador
envia o sinal recebido pelo programa para o motor, fazendo-o abrir e fechar de
acordo com o comando enviado. Uma maquete ampla e bem organizada facilita a
visualização dos componentes e melhora a compreensão do
projeto desenvolvido.
Palavras-chave: portão eletrônico; microcontrolador;
servo-motor.
1.
INTRODUÇÃO
Atualmente a tecnologia influencia
diretamente o ambiente em que as pessoas vivem, e a cada dia são
lançados novos produtos. Isto também acontece com os
portões das casas e dos prédios. É muito mais seguro abrir
o portão com apenas um toque em um botão, do que ter que descer
do carro, abrir o cadeado, abrir o portão, entrar no carro,
colocá-lo para dentro da garagem, voltar para o portão e
finalmente fechar e trancar o cadeado. O projeto desenvolvido pode fazer isso
com apenas um toque.
Um
porteiro de um prédio, para ter mais segurança e não
precisar sair da guarita para abrir o portão, poderá utilizar um
sistema de abertura de portão semi-automático. Facilitando a vida
para os moradores assim como aumentando a segurança e o controle de
saída e entrada de veículos no estabelecimento.
Sabendo
que um portão eletrônico facilita a vida para muita gente, opta-se
por fazer um portão semi-automático, com duas etapas, a primeira
abre o portão da rua para a residência, e a segunda abre a porta
da garagem, tornando o ambiente mais seguro com duas proteções.
2. OBJETIVO
2.1
Geral
Desenvolver o aprendizado adquirido nas
matérias do terceiro período, como: Física III, Circuitos
Elétricos, Sistemas Digitais I, Técnicas Avançadas de
Programação e Mecânica. Por meio deste projeto, aplicar
todo o conhecimento para o funcionamento correto dos motores assim como as
forças aplicadas sobre o material (portão).
2.2
Específicos
·
Apresentar uma
fonte de pesquisa para futuros projetos ou estudos, mostrando o funcionamento
correto dos componentes assim como esclarecer duvidas com os problemas
enfrentados durante o trabalho.
·
Estudo sobre as
vantagens, características e utilização da linguagem C++
para haver uma melhor conectividade entre o software e o hardware.
·
Mostrar uma
forma mais simples de um sistema completo e sólido de portões e
portas eletrônicas.
·
Demonstrar a
praticidade da utilização de microcontroladores.
·
Tornar a
finalidade do projeto mais barata e econômica, para um maior acesso.
3.
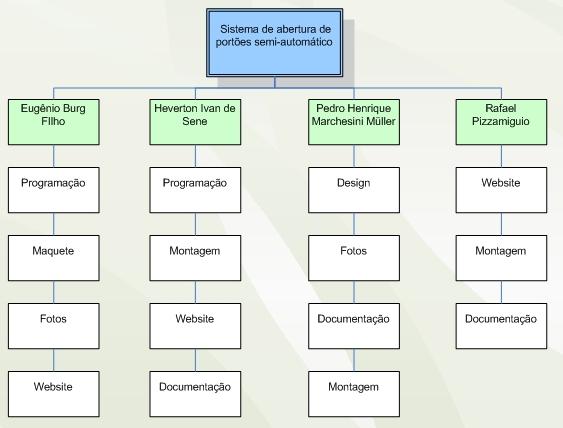
ORGANOGRAMA E CONOGRAMA
Organograma terá por finalidade a
indicação dos responsáveis por coordenar cada parte do
projeto.
![]()
Cronograma estima o tempo
necessário para a realização de cada etapa. O mesmo
está distribuído da seguinte forma:
|
CRONOGRAMA |
||||
|
Atribuição |
Ago |
Set |
Out |
Nov |
|
Discussão
sobre o tema do projeto: |
|
|
|
|
|
Elaboração
do Pré-projeto: |
|
|
|
|
|
Criação
do Blog: |
|
|
|
|
|
Construção
da Maquete: |
|
|
|
|
|
Pesquisa
do que será implantado: |
|
|
|
|
|
Compra
dos Componentes: |
|
|
|
|
|
Construção
do Projeto: |
|
|
|
|
|
Apresentação
do Projeto: |
|
|
|
|
|
Programação: |
|
|
|
|
4. HARDWARE
A base para nosso sistema foi o artigo do
professor Afonso F. Miguel, intitulado “DAD - Aquisição de
dados via porta serial com PIC12F629/675”.
Uma vez que o dispositivo descrito pelo
artigo acima se encaixou perfeitamente para a solução do
problema.
4.1 Introdução ao DAD
O DAD é um dispositivo de
aquisição de dados via porta serial, foi utilizado tal componente
devido a diversos fatores como, por exemplo, a maioria dos computadores possui
comunicação serial.
Além disso, os CI’s
utilizados no DAD possuem custo baixo e ainda atendem as necessidades de nosso
projeto.
Utilizou-se o Módulo M1 –
“PWM Controller”. Pois ao optar pela utilização de
servos motores esse foi módulo que mais se adequou as nossas
necessidades.
Para a construção do
dispositivo proposto serão necessários os seguintes componentes:
·
1 conversor
RS232-TTL (pode ser um MAX232);
·
1 Transistor de
uso geral (BC548);
·
2 Resistores de
1 k ohm.
·
4 Capacitor
Eletrolítico – 1uF x 16V;
·
2 Fonte
Alimentação - 5 Volts;
·
1 PIC12F629;
·
1 Cabo conector
Serial DB9;
·
1 programador de
PIC;
·
2 Servos
Motores.
Com os equipamentos acima será
possível controlar um servo motor através da porta serial.
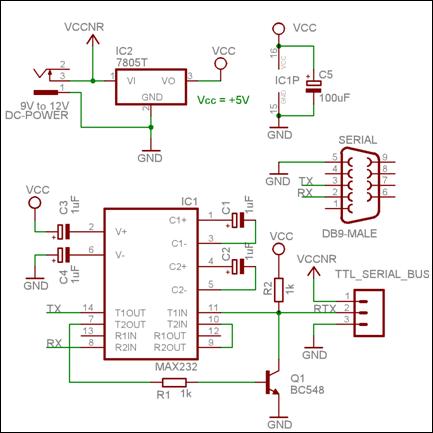
4.2
Conversor RS232–TTL.
O conversor RS232 – TTL serve para
adquirir o sinal que sai da porta serial do computador e transformar esses
sinais em níveis lógicos que sejam entendidos pelos
padrões TTL.
Esse conversor é vital para o funcionamento
do dispositivo, pois a saída serial do seu PC geralmente possui valores
de -12V (Nível Lógico 1) e +12V (Nível Lógico 0), e
o PIC12F629 é do padrão TTL, ou seja ele aceita apenas sinais de
+5V para nível lógico 1 e de 0V para nível lógico
0.
Para a montagem deste componente é
de suma importância o datasheet (folha com as
especificações técnicas dos componentes) para não
ligar nada errado e acabar danificando o circuito. Com uma simples pesquisa na
internet é possível encontrar diversos datasheets. Veja abaixo o
diagrama do RS232:
Figura 02. Módulo
Conversor RS232 – TTL Fonte: DAD, prof. Afonso,
pág 2
4.3
O PIC12F629
Como já citado acima, o PIC12F629
é da família de componentes TTL com tensões variando de 0V
à 5V, ele é um dispositivo que têm memória flash, ou
seja ele pode ser programado e reprogramado quantas vezes forem
necessárias.
Para se programar o PIC12F629 é
necessário conhecer a linguagem de programação assembly,
caso não conheça adquira o código pronto em http://www.engcomp.pucpr.br/afonso/.
Uma vez com os códigos em mãos será necessário o
programador de PIC. Um exemplo pode ser o PIC START PLUS 2.
O PIC fará a conexão entre
o Servo Motor e o RS232, que por sua vez estabelecerá uma conexão
com o PC, a esse conjunto dá-se o nome de Circuito Integrado, pois no
fim das contas é o PC que controla o motor através de um efeito
cascata de componentes.
A principal característica do PIC
é gerar um sinal PWM, que controla os servos motores.
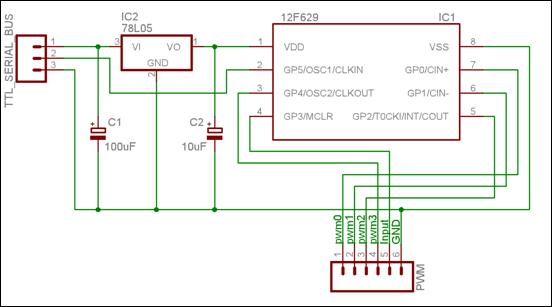
Assim como o conversor RS232 – TTL,
também com a ajuda do freeware CADSOFT EAGLE, foi composto a parte do
módulo M1 que possui o programa e a parte do PIC, veja abaixo:
Figura 03. Módulo
M1 – Gerador de PWM Fonte: DAD, prof. Afonso,
pág 12
4.4 O Sinal PWM
O sinal PWM, do inglês Pulse Width Modulation, que significa,
em uma tradução livre, Modulação por Largura de
Pulso. Ele funciona de acordo com a largura do pulso, ou seja, em Física
todo pulso possui um período que é o comprimento de uma onda.
Esse comprimento de onda também
é conhecido como ciclo ativo (Dutty
Cicle). Cada ciclo pode ter comprimento e período diferentes, os
servos motores trabalham com pulso com período ativo de 50 Hz (Hertz).
Segundo TORRES (2005, p. [eletrônica])
os
“Circuitos digitais só
produzem dois números: "0" e "1". Já
circuitos analógicos podem ter uma infinidade de
variações. Por exemplo, em um circuito digital só podemos
ligar ("1") ou desligar ("0") um motor ou uma
lâmpada, enquanto que em um circuito analógico podemos controlar
em infinitos gradientes o brilho da lâmpada desde o seu estado total de
apagamento até o seu brilho máximo. Com um motor acontece o
mesmo, podemos controlar em infinitos gradientes sua velocidade, desde o seu
estado de não rotação até a sua velocidade
máxima.”
Então um pulso PWM serve para
deixar o motor na posição que se deseja.
4.5 Servo Motor
Para controlar os servos motores
utilizando sinais digitais é necessário utilizar os pulsos PWM,
como descrito anteriormente.
Um servo motor é um motor de
precisão, que gira de 0º a 180º, de acordo com o Dutty Cicle da onda, isso que dizer que
para a maioria dos servos, um pulso com ciclo de 5% o deixaria na
posição de 0º e um pulso de 10% o deixaria na sua
posição máxima 180º. Nesta situação
qualquer valor intermediário também funcionará.
Os servos motores são usados em
larga escala em antenas parabólicas. Quem nunca ouviu esta frase do
técnico “o motorzinho da sua antena queimou.”? Esses motores
são os mesmos servos que cada vez que se sintoniza um canal ele polariza
a antena.
Os servos possuem três fios: um
preto que será ligado no GND do seu circuito; um vermelho sendo
alimentado pela fonte de +5V; e um fio branco, conectado na saída do seu
PIC12F629, ou seja no Pulso PWM.
Abaixo estão listados os
principais comandos para utilização do servo junto com o PIC,
veja:
·
servo.pwm.T=N: Na realidade este não é um comando, mas sim um atributo
que define o período dos PWMs. A freqüência de saída
será o inverso do período. Este comando suspende o funcionamento
de todos os PWM ativos.
·
servo.pwmK.on(M): Este comando liga o PWM com um específico ciclo ativo
dependendo do valor de M. Observe que se M=0, o sinal permanecerá
totalmente em nível baixo. Se M=N/2, a saída do PWM ficará
com um ciclo ativo igual a 50%. Se M>N, a saída do PWM
permanecerá totalmente em nível alto. Para calcular o valor de M
a partir do ciclo ativo desejado, podemos utilizar a seguinte
equação: M = (CA*N/100).
4.6 Fontes de Alimentação de 5V
Para alimentar todo o circuito foram
utilizados duas fontes de alimentação de 5V que possuem uma carga
de 0,8 (A), assim ao utilizar as duas fontes em conjunto, paralelas, aumentamos
a carga para 1,6 (A), para que os motores fiquem mais potentes e a fonte não
trabalhe muito forçadamente.
As fontes foram desenvolvidas no 2º
Período do curso e reaproveitadas nesse projeto.
Para a criação das fontes
serão necessários:
·
1 placa de
circuito impresso – (fenolite ou fibra) face simples
·
1 chave (2
posições)
·
4 diodos
retificadores 1N 4004
·
1 transformador
110 para 12 V, corrente
de 800 mA
·
4 bornes (2
vermelhos e dois pretos) - opcional
·
1 capacitor
eletrolítico de 1000 uF
e tensão 25 V
·
1 resistor de
2,2 k Ohm - ½ W de potência
·
1 regulador de
tensão 7805 (5 V)
·
1 dissipador
para o regulador de tensão e parafuso
·
Estanho para
solda
O diagrama da fonte é o seguinte:
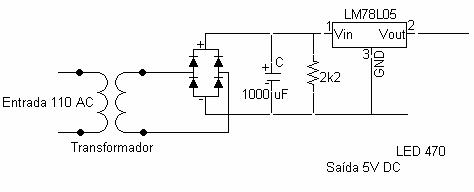
![]()
Com essas duas fontes será
possível alimentar todo o circuito e ainda os dois motores.
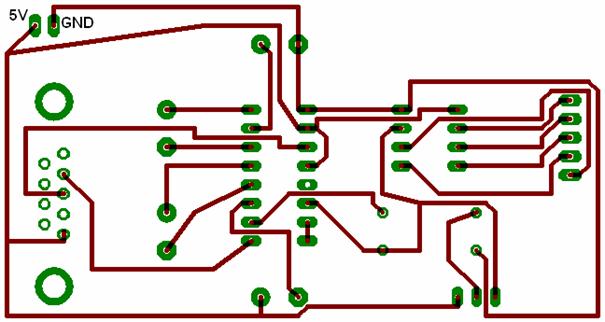
4.7 Visão geral do Dispositivo Montado
Para o desenho da placa também foi
utilizado o Cadsoft Eagle, e como o circuito montado de acordo com a figura
abaixo, foi possível desenvolver toda a comunicação entre
o PC e o Servo.
Figura 05. BOARD da placa
impressa Fonte: Elaborado pelos
Autores
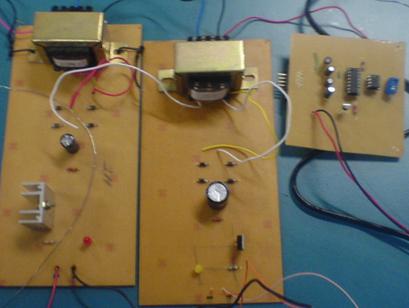
Depois de pronta e corroída a
placa a junção da placa e do circuito ficou da seguinte maneira:

5. SOFTWARE
O programa desenvolvido e adaptado para o
projeto SisConP (Sistema de Controle de Portões) foi elaborado com a
utilização do Visual C++ versões 2005 e 6.0, e seguiu o
princípio do funcionamento do hyperterminal: os botões chamam uma
função que manda determinada string através da porta
serial. Assim, é possível realizar o controle e a
configuração da velocidade e do período dos servos motores
com um simples clique. A interface do software adaptado tem os botões
necessários para cada comando que o servo demanda, bem como uma janela
onde aparecem as mensagens enviadas e há ainda a possibilidade de se
digitar os comandos que se deseja enviar.
Para
o desenvolvimento do programa utilizou-se de um outro programa que usava uma
classe serial e suas respectivas funções, com o intuito que
pudéssemos aprender a utilizar e reconhecer as funções
dessa classe. Os recursos de caixa de texto e de botões são
padrões do ambiente de programação, que permitem a partir
de um clique na ferramenta criar um botão ou um “dialog”,
que são as janelas desenhadas e as mensagens. Após a
criação de um botão, por exemplo, pode-se atribuir um
objeto de determinada classe a esse botão, bem como editar a
função que o programa executa quando o botão é
pressionado, ou quando não o é.
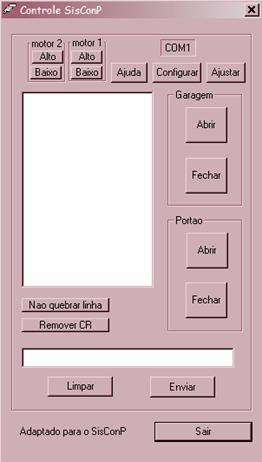
Figura 12. Imagem do programa
28/11/2007.
Fonte: Elaborado pelos Autores
6. FOTOS

Figura 08. Foto da maquete tirada
dia 27/11/2007.
Fonte:
Elaborado pelos Autores

Figura 09. Foto da maquete tirada dia
27/11/2007.
Fonte: Elaborado pelos Autores

Figura 10. Foto da maquete tirada
dia 27/11/2007.
Fonte: Elaborado pelos Autores

Figura 11. Foto da maquete tirada
dia 27/11/2007.
Fonte: Elaborado pelos Autores
7.
PROBLEMAS RESOLVIDOS
1)
Qual módulo de aquisição usar?
No
inicio do projeto, sem muitos conhecimentos o “Módulo de
Aquisição com PIC16F876” disponível na pagina do
Prof. Afonso era o mais provável a ser usado. Mais tarde, foi feita uma
observação de que o motor ideal para o funcionamento do
portão seria um servo motor. Porem perdeu-se várias semanas
até descobrir que o módulo em questão não suportava
servo motor, por não possuir um regulador de freqüência.
Após essa descoberta, passou-se a usar o “Módulo
DAD”.
2) Servo motor ou motor de passo?
O
servo motor tem um limite de 180º, perfeito para a porta e o portão
eletrônico. Alem de que o servo motor possuir uma precisão maior e
a força que ele atua é maior do que a do motor de passo.
3) O servo motor não possui
força suficiente para levantar o portão de madeira.
Com
o surgimento deste problema, resolveu-se colocar um contra peso no
portão, assim, facilitando a sua subida.
4) Problemas na hora da
apresentação.
Surgiu um imprevisto, o Servo não
tinha força depois de analises percebeu-se que o eixo excêntrico
do motor estava solto e assim rodando em falso.
Uma dica útil sempre tenha
componente de reserva.
8.
CONCLUSÃO
O aprendizado adquirido neste projeto foi
bastante amplo e proveitoso. Nas várias pesquisas feitas para entender o
funcionamento de todos os componentes utilizados, compreendemos que um projeto
não é só feito de intensivas pesquisas, mas também de muita dedicação e
entrosamento da equipe toda.
Com
base nisso, é importante dar-se ênfase para alguns conhecimentos
compreendidos. Na eletrônica foi analisado o funcionamento de resistores,
diodos, capacitores, cabo serial e circuitos integrados – com maior
ênfase no PIC12F629.
Compreendemos
também o funcionamento de uma porta de comunicação com o
computador, a serial, seus canais e suas respectivas funções, o
que representam funções, o que representam e o modo como ocorre a
comunicação entre o CI e o computador.
Conclui-se, portanto, que o projeto foi um sucesso,
sendo que as metas principais foram atingidas e os problemas propostos e que
surgiram no decorrer das implementações e foram solucionados.
REFERÊNCIAS
Miguel, Afonso Ferreira. Sistemas Digitais I. Disponível em:
<http://www.engcomp.pucpr.br/afonso/Graduacao/SDI/sistemas_digitais_I.htm>.
Acesso em: 28 de novembro de 2007.
Richardt, Nadia Ficht. Normalização de trabalhos
técnico-científicos. Disponível em:
<http://www.biblioteca.pucpr.br/sibi/normas/index.htm>. Acesso em 28 de
novembro de 2007
Wikipédia. Servomotor. Disponível em:
<http://es.wikipedia.org/wiki/Servomotor>. Acessado em 28 de novembro de
2007.
Microship. PIC12F629/675
Datasheet. Disponível em:
<http://ww1.microchip.com/downloads/en/devicedoc/41190c.pdf>. Acessado em
28 de novembro de 2007.
Texas Instruments. MAX232 datasheet. Disponível em: <http://pdf1.alldatasheet.com/datasheet-pdf/view/27224/TI/MAX232.html>.
Acessado em: 28 de novembro de 2007.