| Gregory Dearth's Theory of Anti-Torque and Anti-Gravity |
| (SYNOPSIS ONLY) |
| I began work on this theory over 4 years ago, I came upon a moment of extreme contemplative clarity. I linked the visual of a single-prop plane jerking sideways as its engine was turned on, the way a high-performance sports car also leans to the side if its engine is fed some gas while parked, to the possibility of controlling this torque motion into a vertical-directed force. I found that precisely timed rotating masses will cancel out horizontal vectors while also providing "open torque" in the vertical direction. Not being too great at math at the time, I was not sure how I could write this out and see if my logic was flawed. I then got the idea that all that mattered to prove it worked was the principle, and that I could express these principles of rotation in the form of my own math, listing the degrees rotated through, the acceleration/deceleration involved on each mass (2), and the point in time when each change in speed of rotation or position occured. The theory evolved quickly from there, first consuming two composition notebooks, then revised into a hard-back notebook, and then revised again into a LARGE hard-back notebook, and coppied into a consolidation work I am still working on, in an even thicker hard-back book. All of this is unpublished, and only a notary-signed letter ensures any privacy or copy-right over the work. I will be mailing myself the book, certified, to execute a poor-man's copy-right of sorts, at which time I will release the full theory on this site. I worked out an oscilation of identical pods, each containing two rotating masses. This engine I refer to as the 'oscilatory-type' anti-torque drive. It is the most stable and rigid to make (no prototype exists due to technological limmitations these days). I also engineered the 'static-bound-type' system, that needs less space and may someday allow a user to upgrade his Porsche into a hover-car. I have reworked the mathematics involved, which have evolved to a messy form of vector-analysis and geometry in the revisions. I found a few errors, corrected them, reviewed my theory many times, and still believe 100% that I'll be a billionaire someday, as it is infallable, clean, and can be understood by any highschool senior that doesn't smoke too much pot. I have also researched the U.S. Pattent Office, being it near my girlfriend's work, and have found nothing even related to research in vertical-torque, anti-gravity production, or simply levitation. Nothing even close to this engines ability exists even in pattent form today. I also found pattents run in the $1100 range for complete protection and review, so I sadly could not obtain one (not on MY budget). Still, I am going to work something out with an Institute for Advanced Technology in Chantilly, VA, and have already been told they will review it for free and give me a proposal for development costs AND submit the concepts to businesses like Lockheed Martin (SR-71, Mach 3 jet from the 70's) for only a small cut-back if it were to work out. They also said their team of physicists and engineers would pick it apart for errors (which I think sounds a bit fishy) and let me know if I'm a crack-pot with a good imagination. My instinct tells me to wait on this one, not to trust anybody with the key to the engine's functionality (sorry, it won't be on my website either), and that in the end I will be able to tell myself if I'm crazy, or will have a better way of getting this thing rolling (hovering). You have heard the basics on it, and will not hear much more, but I will post some drawings of some prototypes I have made (yes, I am a damn good artist, too) on this site. If I only had a scanner... The basic performance rundown is shady, but should be close to these figures: 0 to 100ft (up) in 30 seconds, operational time: 5 to 7 hours, weight: doesn't matter! technology era: year 2020-2060 price of prototype vehicle, 1 passenger: under $250K (initially) features: GPS navigation, auto-altitude control, single hand steering, afterburner micro- combustion jet propulsion (forward), auto- speed safety monitor, internal generator (to recharge powercells for anti-torque drive), optional nuclear power core, with meltdown detection and core-deactivation system, parachute safety descent (if anti- gravity drive fails/looses charge) |
| I have managed to put the whole theory on disk (takes four 1.4MB floppys). I have included some excerpts here, including a few diagrams and equations that may be interesting to people. |
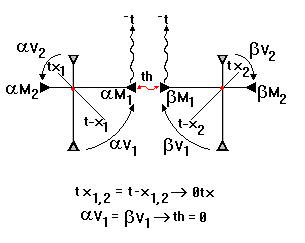 |
| The third-phase reaction whereby the inertia of the upward accelerating masses is converted directly into anti-torque (upward momentum). The horitontal torque vectors are cancelled out by having two pairs of such rotating masses rotate opposite eachother. |
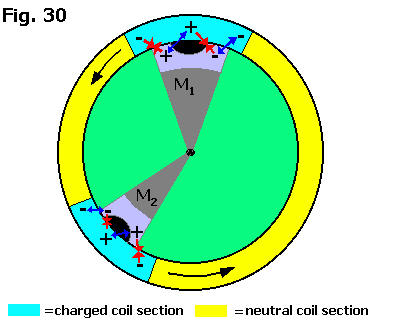 |
| The general concept on how to rotate masses about an axis with extreme accuracy with respect to their speeds of acceleration and deceleration. |
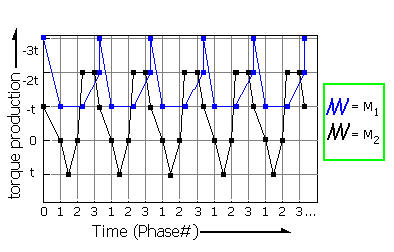 |
| Torque output of engine array with respect to cycles repeated (time). M1 represents the primary mass which is 2:1 of M2. |
 |
| Proportion equation that determines the final velocity of one of the rotating masses. |