Autores:
Rafael da Silva Pereira (Colégio Militar)
Ítalo Wadalington Cruz (Colégio São Bento)
Renato Mugrabi Pinto (Colégio Palas)
Orientador:
André Tomaz de Carvalho
(Eng. Eletricista -
CEPEL)
Rio de Janeiro,
julho de 2001
Este trabalho apresenta resumidamente os tópicos de robótica estudados pelo grupo com vistas a construção de um braço mecânico. São abordados alguns conceitos genéricos sobre robótica e tipos de robôs. O foco principal concentra-se no controle digital de motores de passo através da porta paralela do computador. Para tal, foi montado um circuito de driver para três motores, e finalmente elaborada uma estrutura mecânica ilustrativa.
Estudar os principais conceitos relacionados a robótica e construir um protótipo didático controlado por computador.
Existem tarefas que o homem, com suas limitações físicas, não pode desempenhar; ou quando as executa não possuem a eficiência de uma máquina especialista. Exemplos disto são os robôs utilizados nas etapas de fabricação e montagem de automóveis, que suportam altas temperaturas e erguem toneladas de metal, tarefas que para o homem executar tornam-se inviáveis.
Os robôs tem sido contruídos para facilitar o trabalho do homem, ocupar-se de tarefas repetitivas e proteger a saúde humana em ambientes que oferecem algum tipo de risco. Atualmente, robôs são utilizados em indústrias, em hospitais a fim de realizar cirurgias delicadas, em câmeras de segurança e até em explorações espaciais.
A Robótica é uma área multidisciplinar, altamente ativa que busca o desenvolvimento e a integração de técnicas e algoritmos para a criação de robôs. Ela abrange conhecimentos de diversas outras ciências, como engenharia mecânica, engenharia elétrica, inteligência artificial, entre outras, com uma perfeita harmonia, que se faz necessária para se projetar tais sistemas.
Os robôs podem ser classificados quanto a sua forma de locomoção ou quanto as suas aplicações e suas formas de trabalhar.
De acordo com o primeiro critério, podem ser de três tipos:
Ø
Tartarugas
(turtlebots): São robos dotados de
características que os assemelham a uma tartaruga, assim como o próprio nome
sugere;
Ø
Estacionários:
São braços dotados de mãos ou garras que normalmente ficam fixos em mesas e
pedestais;
Ø
Andróides:
Robôs que possuem formas baseadas na anatomia do corpo humano e assim se
locomovem.
Quanto à sua forma de trabalhar eles podem ser divididos em:
Ø
Robôs
Inteligentes: são controlados por sistemas multifuncionais computadorizados;
eles tem a capacidade de interagir com o ambiente e de tomar decisões em tempo
real. Atualmente dedica-se grandes esforços no desenvolvimento desse tipo de
robô;
Ø
Robôs
com controle por computador: estes semelhantes aos anteriores, porém não
possuem o recurso de interagir com o ambiente. Caso estes forem equipados com
sensores e software adequado, se transformam em robôs inteligentes;
Ø
Manipuladores:
estes são dotados de sistemas mecânicos-funcionais, cujo o seu sensível
sistema de controle permite-lhe governar o movimento de seus membros das
seguintes formas:
¯
manual,
quando o operador controle diretamente os movimentos;
¯
de
sequência variável, quando é possível alterar algumas das características
do ciclo de trabalho.
O projeto aqui apresentado consiste na implementação de um braço mecânico com motores de passo. Trata-se de um robô estacionário manipulador controlado por computador. Seu funcionamento baseia-se no recebimento das ordens que deve executar definidas por seu operador através de um programa de controle elaborado em Object Pascal.
O
motor de passo é um transdutor que converte energia elétrica em movimento
controlado através de pulsos, o que possibilita seu deslocamento por passos. O
seu funcionamento consiste num campo rotativo, gerado pela eletrônica de
controle.
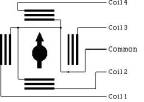
O
motor de passo utilizado em nosso projeto é do tipo híbrido de 5 fios.
Apresenta um rotor de ímã permanente e magnetizado axialmente, uma
grande precisão, boa relação torque/tamanho, e ângulos pequenos (no nosso
caso 1,8 graus). Para que o rotor
avance um passo é necessário que a polaridade magnética de um dente do
estator se alinhe com a polaridade magnética oposta de um dente do rotor.
|
Ele
é controlado por um algorítmo de controle, que consiste uma seqüência finita
de comandos básicos para ligar e desligar de cada bobina.
No caso, o algorítmo irá controlar a seqüência de acionamento das 4
bobinas do motor, e consequentemente, a direção e a velocidade do movimento de
rotação executado pelo mesmo.
Conforme
os pulsos na entrada do circuito de alimentação do motor, este oferece
correntes aos enrolamentos certos para fornecer o deslocamento desejado. Para
fazer o motor girar em um sentido, basta portanto ligar e desligar suas bobinas
em uma sequência lógica, como sugere a figura abaixo, onde são ligadas
sequencialmente as bobinas 3, 4 e 1.
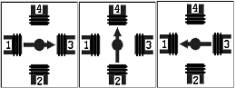 |
Fig. 2: Rotação do eixo do motor por ação das bobinas
Uma
grande vantagem dos motores de passo, e muito utilizada em nosso projeto é a
estabilidade. Quando quisermos
obter uma rotação específica de um certo grau, calcularemos o número de rotação
por pulsos o que nos possibilita uma boa precisão no movimento.
Esses motores apresentam em sua estrutura uma engrenagem que permite uma
precisão muito grande nos movimentos. Nesse
trabalho, o giro que o motor executa tem precisão de até 1,8 grau.
O
torque do motor de passo depende da freqüência de acionamento das bobinas.
Quanto maior a freqüência, menor o torque, porque o rotor tem menos tempo para
mover-se de um ângulo para outro.
Para
fins de implementação do braço mecânico, o motor de passo se mostrou
adequado pelo seu custo reduzido, sua capacidade de bloqueio, seu tamanho e peso
reduzidos, e principalmente pela sua facilidade de controle digital, sem
necessidade de realimentação.
O
circuito de controle transforma os sinais enviados pela porta paralela do
computador em tensões de ativação de cada bobina. Para tal, foi utilizado o
chip ULN 2003, dedicado a essa finalidade.
A
maneira como os componentes foram dispostos está representada basicamente no
desenho abaixo:
|
|
Fig. 2: Diagrama esquemático do Projeto.
O circuito controlador na verdade é composto apenas de um elemento: um computador.
Nele foi implementado um programa escrito em linguagem Object Pascal, cujo layout possui apenas sete botões, sendo que um deles é um botão de reset e os outros seis são botões para o controle dos motores de passo acoplados no braço mecânico. O layout do programa encontra-se representado abaixo:
Figura 3-Layout do programa.
O
funcionamento do programa também é bastante simples, ele instrui o computador
para mandar sinais elétricos pela porta paralela, que conseqüentemente virão
a mover o braço mecânico segundo a vontade do operador.
Para
melhor entendimento do assunto surge a necessidade de se falar melhor sobre esse
dispositivo que o computador usa para se comunicar com o meio externo.A porta
paralela é um dispositivo que tem como característica marcante o fato de poder
enviar e receber bits (dígitos binários) traduzidos na forma de sinais elétricos
em paralelo.
A
porta paralela está presente na placa mãe dos computadores mais recentes, mas
em computadores mais antigos ela se encontra numa placa de circuito impresso a
parte.
Entre
ela e o meio externo há um conector chamado DB-25 ,que se encontra saliente atrás
do computador. Sua pinagem assim como os sinais elétricos relacionados com os
seus respectivos pinos estão representados na figura abaixo:
Fig. 4: DB-25 e os sinais elétricos.
É
desse conector que sairão os sinais elétricos que seguirão para o circuito
protetor.
O
circuito protetor se encontra disposto sobre uma placa de madeira, funcionando
como um circuito intermediário entre o computador e o circuito de driver. Ele
é constituído de apenas alguns resistores e acopladores ópticos, que são
componentes eletrônicos que têm o papel de evitar que qualquer dano ocorra ao
computador, de modo que se acontecer algo de errado, como um curto-circuito,
isso não afetará o computador.
Desse
circuito os sinais elétricos partem para o circuito de driver.
O
circuito de driver foi desenvolvido numa placa universal, na qual encontram-se
os seguintes componentes: leds, chips e barras de conectores.
Nela os
chips possuem o simples papel de transformar
os sinais elétricos que a eles chegam (vindos do circuito protetor) em
sinais de potência, que moverão as bobinas
dos motores de passo por meio de efeitos eletromagnéticos. Cada chip se
encarrega de um motor de passo.O desenho do tipo de chip usado e o seu código
encontra-se na figura 5 logo abaixo:
Fig. 5: O chip ULN 2003 e suas conexões elétricas.
Os
leds são componentes emissores de luz, que no caso permitem a “visualização
dos sinais elétricos que partem em direção aos motores de passo”.
Desse
circuito os sinais partem para os motores, que moverão o braço à vontade do
seu operador.
Foram
utilizados três motores de passo para realizar os movimentos do braço, que
podem ser vistos na Fig. 6.
O
motor M1 é fixado à base do sistema, e é responsável por girar
horizontalmente todo o braço. Para tal, acopla-se ao eixo de sustentação do
braço através de uma polia.
O
motor M2 é fixado ao braço, sendo responsável pelo giro vertical da garra mecânica
através de um sistema de engrenagens.
O
motor M3 corresponde à garra mecânica, e tem a função de regular sua
abertura a fim de segurar ou soltar os objetos.
Fig. 6: Esboço do Braço Mecânico
O
robô construído, apesar das limitações mecânicas decorrentes da falta de
material adequado, mostrou-se muito eficiente, atingindo todos os objetivos
previstos.
A
utilização de motores de passo torna-se conveniente a esse tipo de aplicação,
permitindo diretamente o controle digital através de um computador.
Esse tipo de tecnologia pode ser expandida para muitos sistemas mecatrônicos de utilidade na indústria moderna e em várias outras aplicações do cotidiano. Trata-se portanto de um tema de grande importância técnica e econômica, sendo ainda a base de todo o estudo de robótica.