 |
Taub,
Herbert - Circuitos Digitais e Microprocessadores; Ed. McGraw-Hill, São
Paulo, 1984.
Sistemas
digitais são construídos a partir de portas. 0 principal fator determinante da
velocidade com que um sistema digital pode executar sua função é a velocidade
com que operam as portas. O fator mais importante relacionado com a velocidade
de uma porta é o atraso de propagação tap
(propagation delay time). É o
tempo requerido pela saída de uma porta para responder a uma mudança no nível
lógico da entrada da porta. Portas que devem operar rapidamente, com tap
no intervalo de microssegundos a nanossegundos empregam dispositivos eletrônicos.
Num
sistema digital eletrônico a tensão em qualquer ponto do circuito tem um valor
representando um ou outro dos dois níveis lógicos (1 ou 0 – V ou F).
Correspondentemente os dispositivos eletrônicos do sistema devem conduzir uma
quantidade substancial de corrente ou conduzir muito pouca ou nenhuma corrente.
Enquanto o sistema puder distinguir entre as duas situações, isto é,
correntes grandes ou pouca ou nenhuma corrente, o valor real da corrente não é
importante. Esta situação é bem diferente da que ocorre quando usamos
dispositivos eletrônicos em sistemas analógicos, onde, pelo menos em princípio,
qualquer mudança na corrente, não importa quão pequena, interessa. Resumindo,
em um sistema digital um componente eletrônico sozinho faz muito pouco. Conseqüentemente, para construir um sistema digital de
certo significado são necessários muitos componentes eletrônicos: milhares,
centenas de milhares e até milhões.
Até
1955, os componentes eletrônicos disponíveis para construir sistemas digitais
eram os diodos semicondutores e as válvulas
a vácuo. Os diodos são relativamente pequenos, com dimensões da ordem de milímetros,
e consomem relativamente pouca potência. As válvulas, por outro lado, são
grandes, tendo dimensões da ordem de vários centímetros e consomem
quantidades relativamente grandes de potência, tipicamente da ordem de alguns
watts. Embora em sua maioria as portas pudessem ser construídas com diodos e
resistores, também era necessário usar válvulas em grandes quantidades. Como
resultado, qualquer sistema digital era grande, caro, e usava muita potência. A
situação melhorou consideravelmente com a invenção do transistor nos anos 50.
Um transistor, normalmente substituindo uma válvula, consome muito menos
potência (da ordem de dezenas de mW) e, como o diodo semicondutor, quando
encapsulado individualmente, tem dimensões da ordem de alguns milímetros.
Ate
1965, somente eram disponíveis semicondutores encapsulados individualmente. Os
engenheiros montavam portas e sistemas digitais a partir destes componentes
individualmente encapsulados e de resistores. Dispositivos semicondutores são
fabricados através da ap1icação repetida de certos processos físicos e químicos
à superfície de uma pastilha de silício extremamente puro. Os detalhes da
fabricação de semicondutores não nos interessam exceto no que tange às
dimensões do dispositivo na superfície do silício, que são da ordem de mícrons.
A maior parte da dimensão de um dispositivo encapsulado individualmente envolve
não o dispositivo em si mas o próprio encapsulamento e o suporte mecânico
necessário para as conexões elétricas. Assim iniciou-se uma série de
progressos tecnológicos (que prosseguem sem que se possa vislumbrar seu final)
que levaram a fabricação de um dispositivo semicondutor chamado circuito integrado (CI). Em um circuito integrado muitos
transistores e diodos são fabricados, isto é, integrados, sobre a mesma
pastilha de silício; na mesma estrutura são também integrados os resistores e
até mesmo as interligações necessárias para fabricar uma porta completa,
muitas portas e, até mesmo, um sistema digital completo.
Circuitos
integrados comercialmente disponíveis são classificados como com integração
em pequena escala (SSI), integração em média escala (MSI), integração em
larga escala (LSI) e integração em muito larga escala (VLSI). Uma convenção
é que um circuito com até doze portas é considerado SSI, de treze a 99 portas
é considerado MSI, de cem a mil portas é considerado LSI e acima de mil
portas, VLSI.
A
origem dos conceitos envolvidos em sistemas digitais perde-se na antiguidade.
Sem dúvida, os povos primitivos podiam contar, e o avanço, que compete
favoravelmente com uma calculadora mecânica, tem pelo menos 2500 anos. Uma
calculadora mecânica digital simples que podia somar e subtrair foi construída
no século XVII. Um dispositivo mecânico incorporando alguns dos conceitos
envolvidos nos computadores modernos foi construído no principio do século
XIX. Calculadoras de mesa mecânicas produzidas em massa e, conseqüentemente,
baratas tomaram-se disponíveis logo após 1930, com capacidade de somar,
subtrair, multiplicar e dividir. Nos anos 40, circuitos eletrônicos usando válvulas
deram aos sistemas digitais velocidades que não podiam ser atingidas pelos
sistemas mecânicos, mas estes sistemas eram grandes e consumiam grandes potências.
Os transistores apareceram nos anos 50 e os circuitos integrados começaram a
evoluir nos anos 60. No início da década de 80, o desenvolvimento dos
circuitos integrados atingiu o ponto de se obter um circuito que cabe na palma
da mão, dissipa em tomo de 1 W, superando sistemas existentes há 30 anos que
envolviam uma sala cheia de equipamento e consumiam milhares de watts.
Existe
um número de famílias de circuitos
integrados lógicos que se destingem umas das outras pelo tipo de dispositivo
semicondutor que incorporam e pela maneira como os dispositivos semicondutores
(e resistores, quando usados) são interligados para formar portas.
Existem
dois tipos de transistores. Um é o transistor de semicondutor-metal-óxido (MOS). Este transistor pode ser fabricado
de modo que a corrente que por ele circula seja conduzida por cargas elétricas
negativas (n), sendo, conseqüentemente, chamado MOS canal-n (tipo n) ou por cargas elétricas positivas (p) sendo, então,
chamado MOS canal-p (tipo p). A grande
vantagem desta família é que não é necessitam usar resistores. Como os
transistores ocupam espaço muito pequeno na pastilha de silício, são muito
apropriados para integração em larga e muito larga escala. Uma família MOS
usa exclusivamente transistores tipo p ou transistores tipo n. Esta família
possui características elétricas que se tornam inconvenientes para integração
em pequena e média escala, não sendo, portanto, usada nestas aplicações,
encontrando maior uso na fabricação de circuitos com integração em larga e
muito larga escala. Uma segunda família usa transistores do tipo p e do tipo n
no mesmo circuito, sendo chamada família MOS de simetria complementar (CMOS). A família CMOS é usada em integração
em larga escala e, por não possuir algumas deficiências da família MOS, também
em integração em pequena e média escala.
O
segundo tipo de transistor é o transistor
bipolar, atualmente fabricado em três famílias. Uma delas é chamada lógica
de injeção integrada (IIL). Como MOS e CMOS,
não requer o uso de resistores no circuito, sendo, portanto, apropriada
para integração em larga escala.
Uma
segunda família usando transistores bipolares é chamada de lógica acoplada pelo emissor (ECL). Usa muitos transistores por
porta; mesmo uma porta de duas entradas requer cinco transistores. É a família
lógica de maior velocidade, pois usa transistores bipolares rápidos em vez de
transistores MOS (mais lentos) e os usa de modo eficiente para fazê-los
responder com grande velocidade. A própria velocidade da família ECL faz com
que se torne difícil de usar. Devido à rapidez das transições de um nível lógico
para outro, faz com que qualquer comprimento de fio que seja usado para
interligar os circuitos deva ser tratado como se fosse uma linha de transmissão.
A família ECL existe em integração em pequena e média escala, mas só é
usada quando sua maior velocidade se faz realmente necessária.
Finalmente,
chegamos à família lógica mais usada para circuitos com integração em
pequena e média escala. É a lógica
transistor-transistor (TTL), desenvolvida principalmente pela Texas
Instrumenst Company mas também produzidos por outros fabricantes. Para a
família TTL, a Texas Instruments usa a designação genérica SN, significando rede
semicondutora (“semiconductor network").
Outros fabricantes usam outras designações, como DM (digital monolítico).
Existem duas séries, uma com o prefixo identificador 54 e outra com o prefixo
74. A série 54 é usada para aplicações militares, onde as exigências são
maiores, e pode operar no intervalo de temperatura de -55 a +125 oC.
A série 74 é uma versão
industrial de custo menor que pode operar de 0 a 70 oC.
Em
circuitos eletrônicos semicondutores geralmente é possível melhorar a
velocidade de operação (isto é reduzir o atraso de propagação e reduzir o
tempo necessário para a transição de um nível
lógico para outro) sacrificando a potência. Como maior potência
envolve maiores correntes, as capacitâncias parasitas podem ser carregadas e
descarregadas mais rapidamente. Estes capacitores parasitas não são
introduzidos deliberadamente no circuito, mas são o resultado inevitável das
dimensões e geometria do circuito. A disponibilidade de correntes maiores torna
possível ligar e desligar os transistores mais rapidamente. Quando usamos mais
potência com a finalidade de obter maior velocidade, gostaríamos de saber se o
aumento de velocidade compensa o sacrifício de potência. Uma figura de mérito
útil neste contexto é o produto velocidade-potência, que é o produto do atraso de propagação pela dissipação de
potência de uma porta.
Quando
transistores bipolares comuns funcionam em circuitos digitais e são ligados de
modo a conduzir corrente, a operação geralmente se dá na região conhecida
como saturação. Em virtude da saturação
o transistor leva um tempo relativamente longo para ser desligado. Conseqüentemente,
os circuitos digitais padrão usando transistores comuns sofrem uma desvantagem
em relação à velocidade. Com uma despesa adicional pode-se, todavia, fabricar
um tipo especial de transistor denominado Schottky,
que não satura, podendo, conseqüentemente, operar em velocidades mais
altas.
Devido
ao balanço possível entre velocidade e potência e devido à possibilidade de
fabricar transistores comuns do tipo Schottky, a família TTL existe em cinco séries
distintas, que são listadas, com suas características, na Tabela-1. A razão
da popularidade da série LS toma-se aparente, embora outras séries possam ser
escolhidas caso haja restrições quanto à velocidade, à dissipação possível
ou ao custo.
Tabela-1.
Características típicas da família 54/74 SSI.
|
Séries |
Tipo de transistor de potência |
Atraso de propagação, ns |
Dissipação de potência, mW |
Produto velocidade-potência, pJ |
54LS
|
Schottky,
baixa potência |
9.5 |
2 |
19 |
|
54L/74L |
Comum,
baixa potência |
33 |
1 |
33 |
|
54S/74S |
Schottky,
potência normal |
3 |
19 |
57 |
|
54/74 |
Comum,
potência normal |
10 |
10 |
100 |
|
54H/74H |
Comum,
alta potência |
6 |
22 |
132 |
Uma
fonte de um sinal digital aplicado à entrada de uma porta deve ser capaz de
estabelecer naquela entrada uma ou outra tensão correspondente a um ou outro nível
lógico. Em qualquer um dos níveis a fonte deve satisfazer os requisitos de
corrente da porta acionada. Como a saída de uma porta freqüentemente é usada
como fonte para a entrada de outra porta, é necessário conhecer a capacidade
de acionamento de uma porta, isto é, precisamos saber quantas entradas de
portas a serem acionadas podemos ligar à saída de uma porta acionadora. Os
fabricantes geralmente fornecem esta informação ao especificar a capacidade de
saída (fan-out). No caso TTL, desde
que cada porta acione portas da mesma série, a capacidade de saída é de 10
para portas das séries padrão e de alta potência,
e de 20 para as séries de baixa potência. Quando uma porta aciona
portas de outras séries, é necessário referir-se à literatura do fabricante
para determinar a necessidade de corrente de entrada e a disponibilidade de
corrente de saída e assegurar-se de que não há carga excessiva para a saída
de uma porta.
Como
a família TTL opera com uma tensão de
alimentação de 5V, todas as tensões
em um sistema TTL estão no intervalo de 0 a 5V. Quando uma porta acionadora não
estiver carregada pela ligação a entradas de outras portas, sua tensão de saída
baixa, correspondente ao nível lógico 0, pode ser 0,1 V ou até menor para a série
54/74. A tensão alta, correspondente ao nível lógico 1, fica em tomo de 3,4
V. Quando a saída for baixa, a porta acionadora deve permitir o fluxo de
corrente da porta acionada para si própria.
A porta acionadora é descrita como drenando
corrente da carga. Quando a saída estiver no nível alto, a porta
acionadora servir como fonte de corrente para a carga e é descrita como suprindo
corrente. No nível de saída baixo a corrente drenada eleva a tensão de saída,
e no nível de saída alto a corrente suprida diminui a tensão de saída. Para
a série 54/74, o fabricante garante que, mesmo que uma porta esteja carregada
até sua capacidade máxima de saída especificada acima, a tensão de saída
baixa não sobe acima de 0,4 V e a tensão de saída alta não
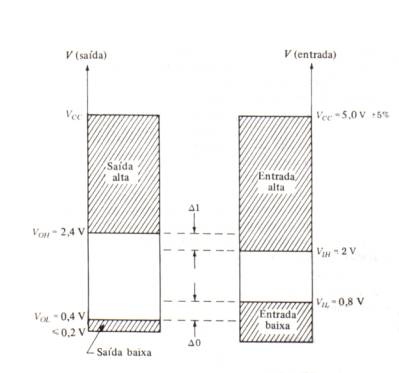
desce abaixo de 2,4 V. 0 fabricante também especifica que uma tensão igual ou
menor que 0,8V sempre será interpretada por uma porta acionada como
correspondendo a tensão baixa (0 lógico)
e que uma tensão de entrada maior que 2V sempre será interpretada como tensão
alta (1 lógico). As duas tensões de saída e as duas tensões de
entrada são representadas pelos símbolos VOH,
VOL, VIH e VIL e têm as seguintes
definições:
VOH:
A tensão de saída mínima
que uma porta fornece quando sua saída estiver no nível alto.
VOL:
A
tensão de saída máxima que uma
porta fornece quando sua saída estiver no nível baixo.
VIH:
A
tensão mínima que pode ser aplicada
à entrada de uma porta e reconhecida
como nível alto.
VIL:
A
tensão máxima que pode ser aplicada
à entrada de uma porta e reconhecida como nível baixo.
Para
as séries 54/74, estas tensões são as especificadas na Fig.1 e levam à
característica de tensão entrada-saída (idealizada) mostrada na Fig. 2. (A
porta a que se refere a figura é uma
porta NAND ou NOR com todas as entradas ligadas de modo a que a porta se
comporte como um inversor.) Quando a tensão de entrada VI estiver no intervalo de 0 a 0,8V ou no intervalo acima de 2,0
Volts, a saída VO é constante e vale
2,4 ou 0,4 Volts, respectivamente. Para VI
no intervalo de 0,8 a 2,0 Volts, a saída varia de seu nível alto de 2,4V
até seu nível baixo de 0,4V.
|
Fig.
1 – Níveis de Ruído.
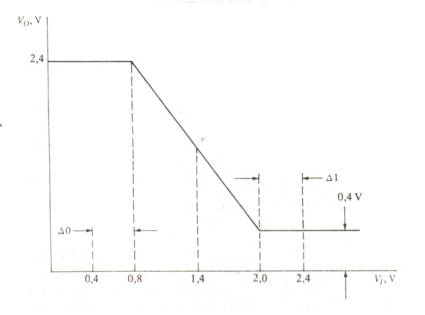 |
Fig.2
– Característica de tensão in/out idealizada.
A
importância destas tensões pode ser vista nas seguintes considerações.
Suponhamos que uma porta acionadora está em seu nível baixo de 0,4 V. A porta
acionada reconhece que sua entrada é baixa porque a tensão é menor que 0,8V
mas, como em qualquer outra implementação física de uma configuração de
portas, tensões espúrias e aleatórias (ruído) podem ser superpostas através
das conexões que ligam uma parte da configuração a outra. A margem para erro
neste nível baixo é a diferença VIL -
VOL, representada pelo símbolo Δ0, conforme indicado na Fig. 1, é
chamada margem de ruído do nível baixo que tem no caso presente o valor
Δ0 = 0,4 V. A margem de ruído do nível alto Δ1 = VOH - VIH também tem o valor 0,4 V.
Assim,
se uma tensão de ruído for
adicionada à tensão de entrada de 0,4 V e for maior que 0,4 Volts, a saída
correspondente da porta adicionada será menor que 2,4 V. Conseqüentemente, a
margem de ruído na saída, originalmente 2,4 - 2,0 = 0,4 Volts, agora será
menor. Se supusermos que o ruído existe em todo o sistema e que em cada
ponto a tensão de ruído tem a direção que causa maiores problemas, podemos
imaginar que, após uma sucessão de portas, chegaríamos ao ponto em que um nível
lógico 1 seria interpretado como um lógico 0 e vice-versa. A margem de ruído
de uma porta é, pois, um parâmetro importante e é vantajoso que seja tão
alta quanto possível.
Devemos
observar que, ao especificar os parâmetros VOH
etc. a partir dos quais Δ1
e Δ0 são calculados, os fabricantes são extremamente conservadores. A
margem de ruído de 0,4 V mencionada acima normalmente alcança 1,0 V ou mais.
Resumindo,
uma família lógica ou uma série de uma família é caracterizada por quatro
parâmetros: (1) atraso de propagação, (2) dissipação de potência (através
da qual podemos calcular o produto velocidade-potência), (3) capacidade de saída
e (4) margens de ruído. A capacidade de saída muitas vezes não é um parâmetro
adequado quando interligamos séries diferentes, e certamente não o é no caso
de interligarmos famílias diferentes.