|
O motor de passo, também chamado motor de relutância variável, é um tipo de motor deveras indicado em projetos de pequeno porte nas áreas de mecatrônica e robótica, pela sua precisão e pela facilidade do seu controle.
A principal vantagem do motor de passo é a possibilidade de controlar sua posição e velocidade com boa precisão, sem a necessidade de realimentação da malha de controle.
|
O motor de passo é controlado digitalmente, e por esse motivo tem grande afinidade com sistemas computadorizados, sendo encontrado na maiorias dos periféricos com partes móveis, tais como scaners, impressoras, drivers de disco, etc.
Existem diversos tipos de motores de passo, alguns podendo chegar a dimensões e potências muito elevadas. Nesse artigo serão comentados em maior detalhe os motores de passo do tipo unipolar de quatro fases, comumente encontrados em periféricos de computadores.
 |
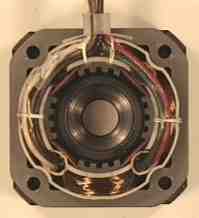
Um motor de passo pode ser dividido em duas partes distintas: rotor e estator. O rotor consiste no eixo móvel, e o estator na carcaça na qual este se sustenta.
Para compreensão do funcionamento de um motor de passo, convém ter em conta três características desse arranjo:
o rotor (eixo girante) está acoplado a um ímã permanente.
o estator possui quatro bobinas (fases) ortogonais que geram um campo magnético girante. Num motor unipolar, a corrente só circula em um único sentido em cada uma dessas bobinas, isto é, cada uma das bobinas só pode ser polarizada em um único sentido.
o acoplamento entre o estator e o rotor é feito através de um sistema de engrenagens, de modo a aumentar a precisão do motor diminuindo a angulação dos passos.
Ao circular corrente por uma bobina (um enrolamento de fio de cobre), pelas Equações de Maxwell fica evidente a geração de um intenso campo magnético ao longo do eixo da bobina, o qual será proporcional ao valor da corrente aplicada e ao número de espiras do enrolamento.
Cada uma das quatro bobinas do motor de passo pode ser acionada individualmente, gerando um campo magnético na sua direção, como sugere a fig.3.
|
|
|
|
|
Logo, é possível controlar discretamente a direção e o sentido do campo magnético no estator do motor de passo.
Sendo o rotor um eixo magnetizado, ao ser submetido a um campo magnético, este sofrerá ação de uma força no sentido do alinhamento do seu campo magnético com o campo externo. O mesmo fenômeno acontece com a agulha de uma bússola, que alinha-se sempre na direção do campo magnético da Terra.
Variando a direção do campo no estator, portanto, varia-se a posição do rotor. Note que diferentemente dos motores de corrente contínua, o acionamento de uma bobina do motor de passo não faz com que o motor gire a uma velocidade constante, mas apenas produz uma força para que o eixo alinhe-se em determinada posição.
No entanto, com apenas quatro bobinas, o motor seria ainda muito impreciso, dando passos de 90 graus. Uma opção para reduzir esse passo seria ligar as 2 bobinas adjacentes simultaneamente, adicionando uma posição intermediária nesse movimento. Essa estratégia de controle é conhecida como controle a meio passo.
No entanto, a precisão do motor com o controle a meio passo seria ainda muito grosseira, dando agora passos de 45 graus.
Para tornar o motor eficiente, acrescentou-se a esse arranjo um sistema de engrenagens de modo a diminuir o passo do motor. Assim, a cada volta do campo girante, o rotor externamente girou apenas uma fração da circunferência completa.
|
|
|
Fig. 4- Estator (com as bobinas) e rotor com engrenagens e ímãs acoplados.
Dependendo do tipo do motor, sua precisão pode chegar a centésimos de grau. Grande parte dos motores de passo encontrados em periféricos de computador tem uma relação de 100 passos por volta, o que dá uma precisão de 3,6 graus com controle de passo completo, e 1,8 graus com controle a meio passo.
É fundamental identificar o tipo de motor utilizado, e qual sua tensão nominal.
Após essa etapa, convém identificar que fios correspondem a quais bobinas.
A primeira distinção a ser feita é quanto aos motores de 5 ou 6 fios. Nos motores de 5 fios, há 1 fio comum de alimentação e 4 fios de retorno, um para cada bobina. No motor de 6 fios, provavelmente a diferença básica é que chegam 2 fios de alimentação (da mesma cor), um para cada duas bobinas.
|
|
Um método indicado na identificação dos fios de alimentação é medir a resistência elétrica entre todos eles dois a dois. A resistência entre o fio de alimentação e cada um dos fios de retorno será igual à metade da resistência entre dois fios de retorno.
Isso ocorre porque o fio comum está geralmente ligado entre duas bobinas. Logo, entre o fio comum e um fio de retorno há apenas uma bobina, enquanto que entre dois fios de retorno há duas bobinas, o que faz com que a resistência medida seja o dobro.
Uma vez identificados os fios de alimentação, a forma mais prática de identificar as bobinas é acioná-las em diferentes seqüências e verificar se o rotor gira corretamente.
Para controlar o motor de passo, é suficiente acionar seqüencialmente suas bobinas ligando-as e desligando-as de acordo com o movimento desejado. Note que é possível controlar exatamente a velocidade e a posição do motor de passo dessa forma.
No entanto, faz-se necessário um circuito que receba a lógica de controle do computador e ligue ou desligue cada bobina.
A opção adotada aqui foi utilizar um chip dedicado para tal. O ULN2003 possui 7 chaves darlignton NPN com capacidade para 50V e 500mA. Cada uma dessas chaves pode ser acionada por um nível lógico TTL.
|
|
A figura abaixo ilustra um circuito montado como exemplo. Os sinais de controle são enviados pela porta paralela. Os LEDs servem para indicar quais bobinas estão ligadas.
Um diodo zenner de 12V (recomendável) foi adicionado entre a fonte de 12V e o pino 9 do chip a fim de absorver tensões de polarização reversa oriundas do colapso do fluxo magnético quando as bobinas são desligadas.
 |
Cada uma das bobinas é ligada seqüencialmente.
|
Passo |
Bobina 4 |
Bobina 3 |
Bobina 2 |
Bobina 1 |
|
|
a.1 |
Ligada |
Desligada |
Desligada |
Desligada |
|
|
a.2 |
Desligada |
Ligada |
Desligada |
Desligada |
|
|
a.3 |
Desligada |
Desligada |
Ligada |
Desligada |
|
|
a.4 |
Desligada |
Desligada |
Desligada |
Ligada |
|
As bobinas adjacentes são ligadas simultaneamente.
Note que nesse caso o campo magnético resultante será multiplicado por raiz de dois. Logo, o torque do motor aumentará.
Outra vantagem desse algoritmo é que a bobina 2 é sempre o inverso da bobina 4, e a bobina 3 é sempre o inverso da bobina 1. Assim, é possível controlar o mesmo motor utilizando apenas dois sinais ao invés de quatro.
|
Passo |
Bobina 4 |
Bobina 3 |
Bobina 2 |
Bobina 1 |
|
|
b.1 |
Ligada |
Ligada |
Desligada |
Desligada |
|
|
b.2 |
Desligada |
Ligada |
Ligada |
Desligada |
|
|
b.3 |
Desligada |
Desligada |
Ligada |
Ligada |
|
|
b.4 |
Ligada |
Desligada |
Desligada |
Ligada |
|
As duas seqüências anteriores são misturadas a fim de reduzir o passo e aumentar a precisão.
|
Step |
Bobina 4 |
Bobina 3 |
Bobina 2 |
Bobina 1 |
|
|
a.1 |
Ligada |
Desligada |
Desligada |
Desligada |
|
|
b.1 |
Ligada |
Ligada |
Desligada |
Desligada |
|
|
a.2 |
Desligada |
Ligada |
Desligada |
Desligada |
|
|
b.2 |
Desligada |
Ligada |
Ligada |
Desligada |
|
|
a.3 |
Desligada |
Desligada |
Ligada |
Desligada |
|
|
b.3 |
Desligada |
Desligada |
Ligada |
Ligada |
|
|
a.4 |
Desligada |
Desligada |
Desligada |
Ligada |
|
|
b.4 |
Ligada |
Desligada |
Desligada |
Ligada |
|