PRINCIPALES FUENTES EXTERNAS DE
PERTURBACI�N DE UN VEH�CULO ESPACIAL
Momentos aerodin�micos: La atm�sfera
superior crear� una fuerza de resistencia que, en general,
producir� un momento perturbador sobre el veh�culo
espacial debido a cualquier desviaci�n entre el centro
aerodin�mico de presiones y el centro de masas. Existen
incertidumbres importantes con respecto a la evaluaci�n de la
fuerza aerodim�mica por lo que debe ser tratada con el
conservadurismo apropiado.
Momentos por gradiente-gravitatorio: Un objeto
en �rbita experimentar� una atracci�n m�s
fuerte sobre su lado "m�s inferior" que su lado
"superior". Esta atracci�n diferencial, si se
aplica a un cuerpo que tiene momentos principales de inercia
desiguales, resulta en un momento que tiende a rotar el objeto para
alinear su eje largo (momento de inercia m�nimo) con la
vertical local.
Momentos por presi�n de radiaci�n solar:
La presi�n de radiaci�n solar puede producir momentos
perturbadores adem�s de fuerzas, que pueden requerir
compensaci�n por el sistema de control de actitud. El momento
por radiaci�n solar es independiente de la velocidad o la
posici�n de veh�culo espacial, existe mientras el
veh�culo est� iluminado por la luz del sol, y es
siempre perpendicular a la l�nea de sol. A la altitud de la
�rbita geoestacionaria, la presi�n por radiaci�n
solar puede ser la fuente primaria de momentos perturbadores.
Momentos magn�ticos: La Tierra y los
otros planetas tales como J�piter, que tienen un campo
magn�tico considerable, a�n ejercen otro momento sobre
el veh�culo espacial en �rbitas bajas.
Momentos perturbadores varios: Adem�s de
los torques introducidos por el entorno exterior del veh�culo
espacial, existe una variedad de otras fuentes perturbadoras de la
actitud, muchas de ellas generadas por el veh�culo espacial
durante el transcurso de su operaci�n. La ventilaci�n
de fluidos, tanto accidentales como deliberadas, son una fuente
com�n de momentos perturbadores del veh�culo espacial.
Las piezas desechables, tales como puertas o cubiertas de lentes,
producir�n un momento instant�neo de reacci�n
cuando se suelten.
De mayor significaci�n tambi�n en el control de
actitud del veh�culo espacial son los torques internos,
resultando del intercambio de momento angular entre piezas m�viles
internas. Esto no tiene ning�n efecto sobre el momento angular
total del sistema, pero puede influir e influye en la orientaci�n
de sensores montados en el veh�culo y a partir de aqu�
en los circuitos de control de actitud que puedan estar operando.
Momentos internos t�picos son los debidos a antenas, paneles
solares, movimientos de instrumentos de exploraci�n, o a otros
brazos desplegables y ap�ndices.
Ir a p�gina principal.
CONTROL DE ACTITUD PASIVO
Las t�cnicas pasivas de estabilizaci�n se aprovechan
de principios f�sicos b�sicos y de fuerzas que se
producen expontaneamente para dise�ar el veh�culo
espacial reforzando el efecto de una fuerza mientras se reducen
otras. En efecto, se usar�n los momentos perturbadores
analizados anterioramente para controlar el veh�culo espacial,
eligiendo un dise�o tal que enfatize un momento y mitigue los
otros.
Una ventaja del control pasivo es la capacidad para lograr una muy
larga vida del sat�lite, no limitada por consumibles de a
bordo o, posiblemente, incluso por el desgaste y rotura de piezas
m�viles. Las desventajas t�picas del control pasivo son
la exactitud total relativamente pobre y la respuesta algo inflexible
a condiciones cambiantes. Donde estas limitaciones no sean de
inter�s, las t�cnicas pasivas funcionar�n muy
bien.
Estabilizaci�n por rotaci�n: Una
t�cnica pasiva b�sica es la estabilizaci�n por
rotaci�n, en donde la "rigidez" girosc�pica
intr�nseca de un cuerpo rotatorio se usa para mantener su
orientaci�n en el espacio inercial. Si no se manifiesta
ning�n torque perturbador externo, el vector momento angular
permanece fijo en el espacio, constante en m�dulo, direcci�n
y sentido. La estabilizaci�n por rotaci�n es �til
en un n�mero de casos especiales donde la fiabilidad y la
simplicidad son m�s importantes que la flexibilidad
operacional. Los sat�lites destinados a �rbitas
geoestacionarias, por ejemplo, son com�nmente estabilizados
por rotaci�n para las dos igniciones requeridas para la
�rbita de transferencia.
Estabilizaci�n por gradiente gravitatorio:
De la discusi�n previa, est� claro que un veh�culo
espacial, en una �rbita razonablemente baja, tender� a
estabilizarse con su eje de momento de inercia m�nimo en
orientaci�n vertical. Esta propiedad puede, obviamente,
usarse como una ventaja por el dise�ador cuando se desea una
orientaci�n de cenit o n�dir para instrumentos
particulares. La manera usual de obtener las propiedades de inercia
del veh�culo espacial requeridas (es decir, largo y delgado)
es desplegar un brazo movido por motor con una relativamente pesada
masa en la punta (varios kilogramos). El control de actitud por
gradiente gravitatorio puro no proporciona estabilidad de gui�ada;
el veh�culo espacial es completamente libre para rotar sobre
su eje vertical.
Estabilizaci�n aerodin�mica y por presi�n
solar: Como con el caso del gradiente gravitatorio, la
existencia de momentos aerodin�micos y por presi�n de
radiaci�n solar induce a pensar en la posibilidad de su uso
en el control del veh�culo espacial. De hecho, esto ya se ha
realizado, aunque su historial de vuelos sea considerablemente
peque�o comparado con el caso del gradiente gravitatorio.
Ir a p�gina principal.
CONTROL DE ACTITUD ACTIVO
Conceptos de control por realimentaci�n: El
concepto b�sico de control activo de la actitud es que la
actitud del sat�lite se mide y compara con el valor deseado.
La se�al de error as� desarrollada se usa entonces para
determinar una maniobra de torque corrector, que es implementada por
el actuadores de a bordo. Puesto que las perturbaciones externas
seguir�n ocurriendo, y puesto que tanto las mediciones como
las correcciones ser�n imperfectas, el ciclo continuar�
indefinidamente.
Volante de reacci�n: Los volantes o
ruedas de reacci�n son una elecci�n com�n para
el control de actitud activo de la astronave, particularmente con
astronaves no tripuladas. En este modo de control un motor el�ctrico
unido a la astronave hace girar una peque�a rueda, de
rotaci�n libre (como el plato de un tocadiscos), del cual, el
eje de rotaci�n est� alineado con el eje a controlar
del veh�culo. La astronave debe llevar una rueda por eje para
un control de actitud completo. Las ruedas de reacci�n dan
una respuesta muy r�pida comparado con otros sistemas. Con
tal sistema, la astronave rota de una manera y la rueda de la manera
opuesta en respuesta a momentos aplicados externamente sobre la
astronave. De la aplicaci�n del teorema del momento cin�tico,
la integral del torque total aplicado en un per�odo de tiempo
producir� una variaci�n del momento angular total
almacenado a bordo de la astronave, que ir� a parar a la
rueda o ruedas rotatorias, dependiendo de cu�ntos ejes se
controlen.
Volantes de inercia: Cuando una rueda de
reacci�n se destina para operar a una velocidad relativamente
alta (quiz�s varios decenas de revoluciones por minuto),
entonces se efect�a un cambio tanto en la terminolog�a
como en la l�gica de control. Se dice que la astronave posee
un volante de inercia; un circuito de control basado en un tac�metro
mantiene la velocidad de la rueda a un valor nominalmente constante
con respecto al cuerpo de la astronave. Esta velocidad se ajusta
ligeramente arriba o abajo en respuesta a los torques externos.
Cuando la gama de estos ajustes excede lo que el dise�ador
del sistema de control ha fijado como el l�mite, la descarga
de momento angular permite que la velocidad de la rueda sea devuelta
en la gama deseada. El uso de un volante de inercia en una astronave
ofrece la ventaja de una estabilidad girosc�pica
considerable. Esto es, un nivel determinado del torque perturbador
producir� un cambio mucho m�s peque�o en la
posici�n nominal deseada de la astronave a causa del
relativamente peque�o porcentaje de cambio que produce en el
vector momento angular total de la astronave.
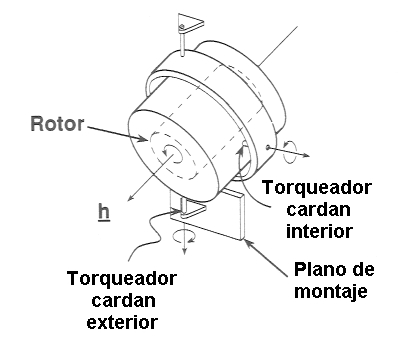 Gir�scopo
inercial de control: Los volantes de inercia pueden usarse
a�n en otra configuraci�n, como gir�scopos
inerciales de control. El gir�scopo inercial de control es
b�sicamente un volante de inercia en un cardan, como el
mostrado en la figura, con el cardan colocado perpendicular al eje
de rotaci�n de la rueda. Un torque aplicado al cardan produce
un cambio en el momento angular perpendicular al vector momento
angular existente, y as� un torque de reacci�n sobre
el conjunto.
Gir�scopo
inercial de control: Los volantes de inercia pueden usarse
a�n en otra configuraci�n, como gir�scopos
inerciales de control. El gir�scopo inercial de control es
b�sicamente un volante de inercia en un cardan, como el
mostrado en la figura, con el cardan colocado perpendicular al eje
de rotaci�n de la rueda. Un torque aplicado al cardan produce
un cambio en el momento angular perpendicular al vector momento
angular existente, y as� un torque de reacci�n sobre
el conjunto.
Torqueadores magn�ticos: Un astronave
que orbita a la altura relativamente baja sobre un planeta con un
campo magn�tico estimable puede hacer uso efectivo de
torqueadores magn�ticos, particularmente para las maniobras
de adquisici�n inicial de actitud y para descargar exceso de
momento angular de ruedas de reacci�n.
Toberas de reacci�n: Las toberas de
reacci�n de control son unos medios comunes y efectivos de
proporcionar control de actitud a la astronave. Son el equipo
est�ndard de las astronaves tripuladas porque pueden ejercer
r�pidamente fuerzas de control grandes. Son tambi�n
comunes sobre sat�lites destinados para operar en �rbita
relativamente alta, donde ning�n campo magn�tico
estar� disponible para la descarga de momento angular. Como
contraprestaci�n a estas ventajas, las toberas de reacci�n
de control usan consumibles, tales como un gas neutro (p. ej., Fre�n
o Nitr�geno) o hidracina tanto en sistemas monopropelente
como bipropelente. Generalmente es inaceptable tener una �nica
tobera funcionando para un eje de control dado, porque su fallo
dejar� incapacitada a la astronave en ese eje.
Ir a p�gina principal.