Design of A Robot Hand

ERCIYES ÜNIVERSITESI
Makine Mühendisligi Bölümü
Danisman : Yrd.Doç.Dr. Sahin YILDIRIM
Hazirlayan : Volkan GÜNES
Eylul 2001
4.Robot El Mekanizmaları :
Robot el mekanizmaları robot kolun serbest ucuna bağlanan
ve belirli bir iş veya görevin gerçekleştirilmesinde çeşitli
cisim ve ortamlarda temas halinde olan yani robotun çevre ile etkileşmesini
sağlayan temel bir elamandır. El mekanizmalarından beklenen
temel fonksiyon herhangi bir iş parçasını ve malzemeyi veya
iş takımını bir şekilde tutmak ve hareket sonunda
uygun bir şekilde bırakmaktır.
El mekanizmaları açıklanan fonksiyonun gerçekleştirilmesine
göre üç ana guruba ayrılır;
-
Mekanik tutucular
-
Vakumlu tutucular
-
Mağnetik tutucular
4.1
MEKANİK TUTUCULAR :
Mekanik tutucular ise tutma işleminde ortaya çıkan harekete
göre ;
-
Dönen parmaklı tutucular
-
Öteleme yapan parmaklı tutucular.
Tutucular cismi dıştan kavrayarak yada cisimdeki bir boşluğa girerek tutma veya kavrama yaparlar. Bir parçayı tutma süresinde farklı tutma şekilleri olabilir. Mekanik tutma işlemi esnek cisimlerin genleştirilmesi veya şişirilmesi ile de gerçekleştirilebilir. Bu amaçla esnek körükler veya torbalar istenilen konuma getirildikten sonra şişirilerek içten veya dıştan tutma işlemi gerçekleştirilebilir.
Mekanik tutucular tutma işleminde kullanılan tahrik elemanlarının
cinslerine göre şöyle sınıflandırılabilir :
-
Kol tahrikliler
-
Dişli veya krameyer tahrikliler
-
Kam tahrikliler
-
Vida tahrikliler
-
Halat ve kasnak tahrikliler
Dizayn
yöntemi
Mekanik tutucuların nasıl kavrayacağı ve ne kadarlık tutma kuvvetinin gerekli olduğunu belirleyebilmek için aşağıdaki faktörler dikkate alınır:
- Robot el iyi bir kavrama yüzeyine sahip olmalıdır.(açık, belirgin bir yüzey olmalıdır.)
-
Kavrama yüzeyi yapısı ve toleransı , kavranacak cismin
veya parçanın boyut,tolerans ve hassasiyetlerini bozmamalıdır,
-
Tutucu el ve parmaklar taşınacak parçanın kavranması,
taşınıp bırakılması ve tekrar alınması
operasyonlarında parça boyutunda meydana gelebilecek değişikliklere
uyum sağlayabilmelidir,
-
Kavrama işlemi, kavranan parçanın yüzeyinde çeşitli
deformasyonlara ve çiziklere yol açmamalıdır,
-
İki farklı boyutlu bir paçanın kavranmasında kavrama
işlemi daha büyük olan boyut üzerinde gerçekleştirilebilmelidir.
-
Tutucu parmakların ya esnek mesnet veya tamponlar yada tutulacak
parçaya uyum gösterecek, kendi kendine ayarlanabilen çenelere sahip olması
gereklidir. Kendiliğinden ayarlanabilen çeneler her bir çenenin parça
üzerinde iki noktada temas etmesini sağlar. Sadece tek bir noktada temas
ederse dönme ihtimali artar.
Çeşitli
Mekanik El Konstrüksiyonları :
a)
Standart el : Ekonomik
ve çok amaçlıdır. Basit bağlantılar,hem parmak hareketini
hem de cismi yeterli hafiflikte tutacak gücün toplanmasını sağlar.
b)
Kendiliğinden
ayarlanabilen parmaklar : Özellikle
düz kenarlı parçaların iyi bir şekilde tutulmasını
sağlarlar. Parça üzerindeki çıkıntılar uygunsuzluk meydana
getirir.
c)
Değişik
boyutlu cisimleri tutmak için kullanılan parmaklar : Özel
parmak dizaynları ile değişken şekil ve boyutlu cisimler
veya işlem esnasında şekil değiştiren parçalar için
uygun bir tutma işlemi sağlar.
d)
Hareketli tek çeneye
sahip el konstrüksiyonu : Bu konstrüksiyonu özellikle cismi alttan tutmanın mümkün
olduğu veya daha güvenli olduğu hallerde kullanılır. Dizaynın
basitliği değişik uygulama alanları için ekonomik bir
konstrüksiyon olarak görülür.
e)
Ambalaj kutular
için el konstrüksiyonu : Özellikle hafif ağırlıktaki ambalajların
taşınmasında kullanılır. Çeneler sabit arka levhaya
göre değişik pozisyonlara ayarlanabilir. Bu da değişik
ebatlı parçaların taşınmasını sağlar.
f)
Cam tüpler için
özel el konstrüksiyonu : Kısa boylu tüp veya boruların taşınmasında
kullanılır.
4.2
VAKUMLU TUTUCULAR
Tutma ve taşıma işlemindeki güvenirlik mağnetik tutuculardan daha iyidir. Vakum meydana getirebilmek için vakum pompalarından veya ventüri cihazlarından yararlanılır. Vakum pompaları pistonlu veya paletli pompa tipinde olabilir. Vakum pompası ile ventüri cihazının mukayesesi aşağıdaki tabloda verilmiştir.
| Avantaj | Dezavantaj | |
| Vakum pompası |
-
Daha büyük vakum meydana getirebilme özelliği -
Düşük işletme maliyeti |
-
Yüksek ilk maliyet |
| Ventüri Cihazı |
-
Düşük ilk maliyet -
Pompadan daha az karmaşık olması |
-
Gürültülü çalışması
|
4.3
MAĞNETİK TUTUCULAR
Ferro mağnetik malzemelerin tutulması ve taşınmasında
mağnetik tutuculardan yararlanılır. İki guruba ayrılır;
-
Sürekli (tabii) mağnetler
-
Elektromağnetler
Sürekli Mağnetik Tutucular
Kalıcı mağnetik özelliklerinden dolayı çeşitli şartlarına kolaylıkla adapte edilebilirler, bu tür tutucular parçayı mıknatıstan ayırmak için özel bir vasıta gerektirirler. Gerekli güç uygulanarak çekme suretiyle parça mıknatıstan ayrılabilir.
Sürekli mağnetik tutucular aşırı
derecede yüzeysel mağnetik nüfusiyet
(penetrasyon) meydana getirecek şekilde dizayn edilirler. 0.08
cm kalınlığındaki sac levhaların takılmasında
yaralanılabilir. Çeşitli özel amaçlı sistemlerde 480 °C
ye kadar kullanılabilmelerine rağmen genel olarak 90 °C
lık malzeme sıcaklıkları kadar verimli bir şekilde
kullanılabilirler.
Elektromağnetik
Tutucular
Bu tür tutucular parçaların yüksek hızda tutulması, bırakılması ve kontrol bakımından uygun bir tutma mekanizması oluştururlar. Mağnetlemeyi sağlayan bir güç kaynağına ihtiyaç vardır. Parçaların kolayca bırakılabilmelerini sağlamak için devreye veya sisteme bir serbest bırakma kontrolörü konulmalıdır. Bu eleman çok fonksiyonlu bir anahtar olup güç kaynağı kesildiğinde kutupları ters çevirerek parçanın mıknatıstan ayrılmasını sağlar. Yani bir ters kutuplama parça üzerindeki herhangi bir artık mıknatıslamayı kaldırarak parçanın bırakılmasını sağlar.
Standart elektromağnetik tutucular cisimleri 60 °C ye kadar tutabilirler. Fakat bu sıcaklık özel dizaynlarla 150 °C ye kadar çıkarılabilir.
Genel olarak mağnetik tutucular robotik taşıma işlemlerinde şu avantajlara sahiptirler :
- Tutma süresi çok kısa
- Parça ölçülerindeki değişimler tutma işleminde bir engel teşgil etmez
- Tutucular tek bir iş parçası için dizayn edilmemelidir veya edilmezler
- Vakumlu tutucularla delikli metal parçaların taşınabilmesi mümkün olmaz
- Tutma işlemi için blok (tek parça) yüzey gerektirmesi
Mağnetik tutucuların dezavantajları ise :
- İş parçalarında artık mağnetlemenin kalması
- Taşıma ve tutma işlemlerinde kayma vb. hataların oluşması
-
Sadece ferromağnetik malzemelerin tutulması veya taşınmasında
kullanılaması
ROBOT BİLEĞE
TAKILAN ÇEŞİTLİ İŞ TAKIMLARI
a) Kaynak tabancası ve torku
b) Isıtma torku (hamlacı) : döküm kalıpların yüzeyleri bu işlemle pişirilir.
c) İnert gaz ark kaynağı (MİG,MAG) torku
d) Döküm potası : erimiş metal gibi sıcak malzemelerin, sıcak ve tehlikeli ortamlarda döküm işlemi için uygundur.
e) Pnömatik somun sıkıcıları, matkaplar, anahtarlar : genel amaçlı bu tür robotlar özellikle tehlikeli ortamlarda uygundur.
Freze çakısı, kum püskürtme, taşlama aparatı : çeşitli taşlama, hassas yüzey işleme ve bileme ekipmanları robot bileğe takılabilir. Bu şekilde donatılan robot istenen amaca uygun işlevini yerine getirir. Plastik parçaların çapakları ve döküm malzemelerin temizlenmesinde kullanılabilir.
Tutucuların Dizayn Ve Seçiminde Dikkate Alınması Gereken Faktörler
|
FAKTÖR |
ÖZELLİK |
|
Taşınacak
parça |
Ağırlık,
boyut,biçim, işleme esnasındaki boyuttaki değişimler
parça ölçüsü toleransları ve yüzey şartları gibi. |
|
Tahrik metodu |
Mekanik tutma, vakumlu
tutma, mağnetik tutma ve diğerler. |
|
Güç ve sinyal iletimi |
Pnömatik, elektrik,
hidrolik ve mekanik |
|
Tutma kuvveti (mekanik
tutucu için) |
Cismin ağırlığı,
tutma metodu veya taşıma metodu,parmak ve cisim arasındaki
sürtünme katsayısı, hareket peryodu süresince hız ve
ivme değerleri |
|
Pozisyon veya konum
ayarlama problemleri |
Parmakların
boyu, robotun hassasiyeti ve tekrarlayabilirliği, parça ölçüsü
toleransları |
|
Servis şartları |
Tutucu işletme
ömrü süresince gerçekleştirilen hareketlerin sayısı.
Parmakların aşınan elemanlarının değiştirilebilme
özelliği. Bakım ve servis imkanları |
|
Çalışma
ortamı |
Isı, nemlilik,toz
ve kirlilik, çeşitli kimyasal maddeler-ortam |
|
Sıcaklıkta
korunma |
Isı kalkanları
ve koruyucuları, uzun parmaklar, basınçlı hava veya su
soğutma ile sağlanan cebri soğutma, ısıl dirence
sahip malzemelerin kullanılması. |
|
Malzeme özellikleri |
Çeşitli mekanik,
mukavemet özellikleri. İmalat kolaylığı ve maliyeti.
Parmak yüzeylerinin sürtünme özellikleri ve çalışma ortamına
uyumluluk. |
|
Diğer kavram
ve özellikler |
Değiştirilebilir
parmakların kullanılması, dizayn standartları. Çeşitli
robotlara göre uyumluluk. Dizayn işlemine etki eden çeşitli
değişik faktörler ve disk, dizayn ve imalat için gerekli süre,
yedek parça bakım ve servis gibi özellikler. |
Örnek bir robot el Dizaynı :
Asagida gorulen robot el dizyni ile TUBITAK Arastirma Projeleri Destekleme Programina Basvuruda bulunulmustur..
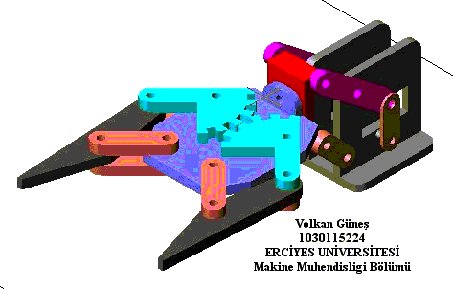
Şekilde görülen robot el dizaynı toplam : 17 parçadan oluşmaktadır. Bu parçalara ek olarak iki adet servo motor kullanılmaktadır. Robot el sistemi öteleme ve salınım hareketleri yapacak şekilde tasarlanmıştır ve parmakların uçlarına tutulacak malzemeye zarar vermemesi için yumuşak uçlar eklenmiştir. El mekanizmasının parçaları sert plastik veya alüminyum alaşımdan üretilmektedir. Geniş bilgiler www.lynxmotion.com adresinde bulunabilir.
Designed by MistyFuture