A distributed approach for solving a
system of linear equations
Abstract
This paper discusses an algorithm and
its implementation for solving a system of linear equations on a
distributed system. The algorithm used is The Cramer's rule for solving
a large number of linear equations simultaneously. Hence, a pivotal
part of this algorithm is solving a determinant of a square matrix in a
distributed manner. This topic of determinant solving is discussed in
detail, followed by some results of running the program with different
number of computers on the network.
Contents
- Introduction.
- Practical applications of solving a system of linear equations.
- Existing solutions.
- A distributed approach for solving a system of linear equations.
- A distributed approach for finding the determinant of a square
matrix.
- Complexity analysis.
- The implementation in detail.
- Results of tests conducted measuring
the improvements in time
required for solving the system of linear equations.
- Future developments.
- Conclusion.
- Acknowledgments.
- References.
1. Introduction
A system of linear equations has many
applications in the fields of chemistry, physics, mathematics, and also
in our day to day lives. Solving slightly non-trivial problems become
very easy if we can express them as a system of linear equations, and
solve them simultaneously. They provide just the abstraction that the
human mind needs to solve the original problem without taking into
account other unrelated data.
We describe in this paper a method
for solving a large number of such simultaneous linear equations
quickly and efficiently on a distributed system. The rationale for
choosing a distributed system lies in the fact that they
are very cheap to build, because a large number of inexpensive
computers
connected by a high-speed network can form a very powerful distributed
network.
We first describe a distributed approach for solving the determinant of
a square matrix, and then apply Cramer's rule to solve the system of
linear equations simultaneously. We shall show how these two tasks are
very much inter-related, and closely coupled for the correct
functioning of the final algorithm.
We have implemented this program on a Linux based system, and have
measured the timings for runs of the program for solving the same
number of equations, but with a different number of clients connected
to
the main server.
2. Practical applications of solving a system of linear equations
- Digital signal processing (DSP)
is the study of signals in a digital representation and the processing
methods of these signals. DSP and analog signal processing are subsets
of signal processing. It has three major subfields: audio signal
processing, digital image processing and speech processing.
In DSP, engineers most commonly study digital signals in one of
the following domains: time domain (one-dimensional signals), spatial
domain (multidimensional signals), frequency domain, autocorrelation
domain, and wavelet
domains. They choose the domain in which to process a signal by making
an educated guess (or trying out different possibilities) as to which
domain best represents the essential characteristics of the signal. A
sequence of samples from a measuring device produces a time or spatial
domain representation, whereas a discrete Fourier transform
produces the frequency domain information. The autocorrelation is,
loosely speaking, defined as the expected value of correlation of the
signal with itself on some distance in time or spatial distance. http://www.fact-index.com/d/di/digital_signal_processing.html
-
Linear programming is the process of solving a
system
of linear equalities and linear inequalities over a set of unknown real
variables, along with a linear objective function to be maximized.
Many practical problems in operations research
can be expressed as linear programming problems. For instance, if x1 is
the number of acres planted with wheat and x2 is the number planted
with corn, and a farmer has a limited number of acres A, and has a
limited permissible amount F of fertilizer and P of insecticide which
can be used, each of which is required in different amounts per acre
(F1, F2, P1, P2) for wheat and corn respectively, and knows the selling
price of wheat S1 and the selling price of corn S2, then the optimal
number of acres to plant with wheat vs corn can be expressed as a
linear program. http://www.fact-index.com/l/li/linear_programming.html
- Numerical analysis is that branch of applied
mathematics which studies the methods and algorithms to find
(approximate) numerical solutions to various mathematical problems,
using a finite sequence of arithmetic and logical operations. Most
solutions of numerical problems build on the theory of linear algebra. http://www.fact-index.com/n/nu/numerical_analysis_1.html
- Nonlinear
Least Squares Curve
Fitting: Simple linear curve fitting deals with functions that
are linear
in the parameters, even though they may be nonlinear in the
variables. For example, a parabola y=a+b*x+c*x*x is a nonlinear
function of x (because of the x-squared term), but fitting
a parabola
to a set of data is a relatively simple linear curve-fitting
problem because the parameters enter into the formula as simple
multipliers of
terms that are added together. Another example of a linear
curve-fitting
problem is y= a+b*Log(x)+c/x; the terms involve nonlinear
functions
of the independent variable x, but the parameters enter into
the formula
in a simple, linear way. http://members.aol.com/johnp71/nonlin.html
3. Existing Solutions
Many solutions currently exist for
solving such a large number of
simultaneous linear equations. Many of them are iterative methods like
the Gauss-Jordan iterative method. Others include the Gauss
elimination, and matrix-methods which involve manipulation of the
contents of a matrix to get the final result. The matrix methods
including the Gauss elimination method essentially use the following
relation:
Ax = B
where,
A --> The coefficient matrix.
x --> The list of variables.
B --> The column matrix representing the RHS of the equations.
The Gauss-Jordan
method, which
is an iterative method uses the values of the unknowns computed at the
previous step in its next step while refining the values. thus, there
is a dependence of one step on the previous step making this method not
very attractive for implementing on a distributed system.
The Gauss
elimination method
involves converting the original matrix into an upper or lower
triangular matrix, and then computing the individual values by
re-substituting them into the resulting equations. This method too
suffers from the defect that each step is dependent on the previous
step. there is one more dependency introduced in the fact that the same
operations must be performed on the column matrix on the other side as
is being performed on the original matrix. Thus, making it unsuitable
for our purposes. [MFA2001]
The matrix-inversion
method
again involves converting the original matrix to a unit matrix, and
suffers from the same defects as the Gauss-elimination method, making
it unsuitable for our purposes.
4. A distributed approach for solving a system of linear equations
In our distributed approach, we use
the Cramer's rule for solving the
system of linear equations. Cramer's rule is defined as:
Given a system of 'n' linear equations in 'n' distinct unknowns
represented as:
a1x + a2y + ... + anz = k1
b1x + b2y + ... + bnz = k2
.
.
.
c1x + c2y + ... + cnz = k3
We can find the unknowns x, y, ... , z using the following formulae:
Let
∆ = det(coefficient matrix)
∆x = det(coefficient
matrix, with the first column replaced by
RHS column
matrix)
∆y = det(coefficient
matrix, with the second column replaced by
RHS column
matrix)
and so on...
∆z = det(coefficient
matrix, with the nth column
replaced by RHS column
matrix)
Thus,
x =
∆x / ∆
y = ∆y / ∆
.
.
.
z = ∆z / ∆
As you can clearly see, the process
of calculating the values ∆, ∆x,
∆y, ..., ∆z is independent of any other process,
and
also each of the
above values can be calculated independently of each other. So, this
method seems to be very attractive for implementing on a distributed
system,
since it involves a series of steps which can be performed
independently of each other. So, in our approach, we use the Cramer's
rule for solving the system of linear equations simultaneously.
As you might have noticed, now that
we know that each of the above
operations can be performed independently of each other the fact still
remains that the procedure for calculating the determinant of a square
matrix is a very time consuming process, and should be done efficiently
for the efficient operation of our algorithm. We describe in detail in
the following section the procedure for calculating the determinant of
a square matrix. Also described is the algorithm for calculating the
same in a distributed environment. [DAB2002] [LN012003]
5. A distributed approach for finding the determinant of a square
matrix
The process of calculating the
determinant of a square matrix is a
recursive one, as we shall show shortly. Thus, it should be possible to
break up the process into distinct independent units, each operating in
isolation from the others.
Consider a 1 X 1 matrix given by:
a
The determinant of this matrix is trivial to find, and is the value 'a'
itself.
Now, consider a 2 X 2 matrix given by:
a b
c d
The determinant of the above 2 X 2 matrix is given by the formula:
a(d) - b(c)
Now, consider a 3 X 3 matrix given by:
a b c
d e f
g h i
To calculate the determinant of the
above matrix, we use the formula:
a(e(h) - f(h)) - b(d(i) - f(g)) +
c(d(h) - e(g))
As you can see, the above step of
calculating the determinant of a 3 X
3 matrix involves calculating the determinant of a 2 X 2 matrix 3
times. And, the process of calculating the determinant of a 2 X 2
matrix involves calculating the determinant of a 1 X 1 matrix 2 times.
Generalizing, we conclude that the
process of calculating the
determinant of an n X n matrix involves calculating the determinant of
an (n-1) X (n-1) matrix 'n' times. This shows us that the process of
calculating the determinant of a square matrix is in fact a recursive
process.
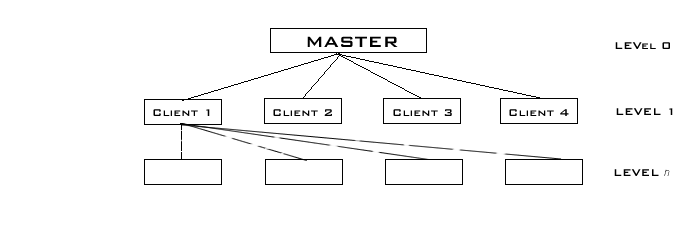
Now, coming to the point of
calculating the determinant of a square
matrix in a distributed environment, we make the following assumptions:
- The computer containing the n X n
matrix whose determinant is to be
calculated is called the 'master'.
- The 'master' is connected to at
least 'n' client machines by
means of a high speed network connection. Each of these 'n' clients are
capable of calculating the determinant of a square matrix.
- Each of these 'n' clients may be
connected to any number of
sub-clients, which may in turn be connected to sub-sub-clients, and so
on and so forth... Thus, the client acts as a server for the
sub-client, and this kind of relationship is replicated at each level.
- It is not necessary for the
correctness of the algorithm for the
points (1..3) to hold, but they are necessary for showing that the
proposed algorithm in such a scenario is very efficient in solving the
determinant of an n X n matrix.
Once the above environment is set up,
the 'master' starts the process
of calculating the determinant of the n X n matrix by delegating to
each of the 'n' clients the task of calculating the determinant of each
of the 'n' (n-1) X (n-1) matrices. These 'n' clients may in turn
delegate part of their work-load to sub-clients connected to them, and
so on and so forth... Thus, which each client has finished performing
the task that its master assigned it, the master is passed back the
result from each of its clients, where it is consolidated and the final
result is computed by the master.
We can express the algorithm as:
- The master delegates the task of
calculating the determinant of
'n' (n-1) X (n-1) matrices to each of the 'n' clients connected to
itself.
- Each of the clients in turn delegate
the work to clients
connected to them, and this continues till there is no client with a
client connected to it. At this stage, the determinant is calculated
locally on that machine.
- These clients at various stages in
the tree-hierarchy then pass
the computer results up the tree to their respective masters.
- The masters who are waiting for the
computer results accept them, and consolidate the computed determinants
of the 'n'
sub-matrices, and compute the value of the determinant of the square
matrix that they have been assigned.
6. Complexity analysis
The complexity for finding the determinant of an n X n matrix can be
expressed by the following recurrence:
O(n) = n + n(O(n-1)) ______(1)
The first 'n' stands for the 'n'
multiplication operations performed
after each of the 'n' (n-1) X (n-1) determinants have been computed,
and the n(O(n-1)) stands for the complexity of calculating the value of
the 'n' (n-1) X (n-1) determinants 'n' times.
Solving the above recurrence, we get:
O(n) = nn _______(2)
The above complexity represents that
for a serial execution of the
determinant algorithm on a uni-processor system, or more simply said,
on a single machine.
To reduce the complexity, we have
decided to use the distributed
approach for computing the determinants.
The complexity for finding the
determinant of an n X n matrix in a
distributed environment is quite different from that in a
non-distributed one.
We notice that each of the (n-1) X (n-1) determinants are being
computed simultaneously(in parallel) on the various clients that have
been assigned the mutually independent tasks of computing the
determinants.
Thus, in the eqn.(1), the term n(O(n-1)
becomes simply O(n-1).
The new recurrence for a distributed system can be given as:
O(n) = n + O(n-1) ______(3)
Solving the above recurrence, we get:
O(n) = n2 _________(4)
Cramer's rule solves the determinant of an n X n matrix 'n' times, so
the first serial(non-distributed) method gives us an asymptotic upper
bound of:
O(n) = n x (2)
O(n) = n x nn
O(n) = n(n+1)
______(5)
However, for a distributed system, the asymptotic upper bound is given
by:
O(n) = n + (4)
O(n) = n + n2
O(n) = n2 _______(6)
Thus, the asymptotic upper bound for solving 'n' linear equations in
'n'
unknowns is: n2.
7. The implementation in detail
The ideas expressed in the document up to now have been implemented in
standard C++ in the form of a computer program, which can be compiled
and run on a Computer system. This section discusses the implementation
in detail, highlighting some of the features and pit-falls of the
current implementation.
The implementation is currently split up into 7 logical units.
- Client
- The client is the part of the code
that runs on the client
machines, and is responsible for connection to the central server.
- The client accepts requests like 'start', 'reset_client', 'reset_subclient'and 'quit' from the server,
and acts on them. See below for a complete list
of commands supported by the client, and how each one of them is
acted upon by the client.
- Server
- The server is responsible for
polling continuously for new
connections from clients. Once a clients tries to connect to the
server, and the server accepts this connection, the client is said to
have been connected to the server, and the server stores the unique ID
associated with this connection locally withing its memory.
- This server also partially manages
the task of distributing the
work-load of solving the determinant remotely along with the
determinant module.
- It most be noted that the server
code is executed on both the
server(master) machine as well as the client machines. This is because
the client may acts as a server for other sub-clients, etc...
- File parser
- The file parser defines a set of
rules for the syntax of
equations that can be understood by the parser, and reads them off the
input file. These set of rules are in the form of a CFL(Context Free
Language) represented by a set of productions.
- The rules are given below.
- Determinant module
- The determinant module is the main
part of the Equation
Cruncher application which is responsible for solving the determinants
both remotely and locally.
- It contains various helper
functions to assist itself in the
correct and efficient execution of the determinant solving logic.
- This piece of code makes heavy use
of threads, and a lot of the
operations being mutually independent can be carried out concurrently.
So, having the master as an SMP system would be highly beneficial from
the efficiency and speed of execution point of view.
- This module interacts extensively
with both the Socket module
as well as the Node manager.
- It extracts free clients from the
Node manager, and instructs
them to carry out various operations. A list of operations and how
these
interactions take place are given below.
- The interaction of this module
with the Socket module is also
very large, and there is strong coupling between these two modules, as
is the case with this module and the Node manager.
- Node manager
- The Node manager is responsible
for effectively and correctly
maintaining the list of all clients currently connected to the master
after the server has recognized such clients and has accepted their
connections.
- This module contains functions
that send matrices across the
network to clients, and on the client side, another set of functions
receive the data, and re-create the matrix in its original form from
the extra data provided in the command header. A description of the
packer header is given below.
- It contains atomic operations for getting a client socket, and
replenishing it.
- This piece of code is tightly coupled with the server code.
- Socket manager
- This contains basic wrapper
functions around standard UNIX
socket functions, and implements basic error checking.
- It throws exceptions if there is
any error in the execution of
the underlying functions.
- The list of exceptions is given
below.
- Synchronization manager
- This is just a thin wrapper around
the POSIX thread API, and
provides a solitary Mutex class which allows programs to have mutually
exclusive access to any piece of shared data.
List of commands accepted by the client, and actions taken when
these commands are received
Command
|
Action taken
|
start
|
When the
client receives a start
command, it first receives the complete matrix from its server, and
then starts evaluating the determinant of that square matrix received.
When the determinant calculation is complete, it sends the server a result command in return along with
the actual result.
|
reset_client
|
When the
client receives a reset_client
command, it performs 2 main functions. Firstly, it sends all its
clients a reset_subclient
command, and secondly it disconnects itself from its server by closing
the open socket, and then starts waiting for a connection once again on
the same IP address and port as before.
|
reset_subclient
|
When the
SubClients receive a reset_subclient
command, they just display the appropriate message to the user, and
propagate the message to their clients.
|
quit
|
When the
client receives a quit
command, it closes the connection with all it's clients, and its
server, and gracefully exits.
|
Set of productions defining the Context
Free Language(syntax) of the equations appearing in the input file.
- EQN --> LHS = RHS
- DOUBLE -->(0..9)* |
(0..9)*.(0..9)+
- RHS --> (+ | - | e)DOUBLE
- LHS --> LHS(+ | -)TERM | TERM
- TERM --> (+ | - | e)DOUBLE_VAR
- VAR --> (a..z)+
Structure of the Packet Header
struct pkt_header
{
int size; // Amount of data after the packer
header gets over.
int type; // Type of packet: { data, command }
int code; // Command issued: { quit, start,
result, reset_client }
double reserved; // Reserved for the implementation to
use as it feels right.
};
List of exceptions thrown by the Socket
module
Exception
Name
|
Thrown
When?
|
Public
Base Classes
|
eqn_cruncher::socket_error
|
Any general
socket error while creating the socket, connecting to the server,
listening for connections, accepting connections, sending/receiving
data.
|
std::runtime_exception
|
eqn_cruncher::host_error
|
Host name lookup error.
|
eqn_cruncher::socket_error |
eqn_cruncher::port_error
|
Error binding to the specified
port number.
|
eqn_cruncher::socket_error |
List of exceptions thrown by the File
parser
| Exception
Name |
Thrown
When? |
Public
Base Classes |
eqn_cruncher::file_error
|
Input file does not exist.
|
std::runtime_exception |
eqn_cruncher::parse_error
|
Error
encountered during parsing the input file. This error is a syntax error
encountered during scanning/reading the input file data.dat. This
exception suggests that the format of the equations is not correct, and
does not adhere to the list of productions given above.
|
std::runtime_exception |
8. Results of tests conducted measuring the improvements in time
required for solving the system of linear equations
The measurements were taken on
systems running Mandrake Linux - 9. They had a hardware configuration
of Intel Celeron 2400MHz CPU with 128MB RAM. The various machines were
connected to each other by a 10/100MBPs fast ethernet connection. In
all, there were 9 systems connected to each other, with one acting as
the server, and the other 9 as clients.
We solved 10 simultaneous linear
equations in 10 unknowns on these systems increasing the number of
clients each time from 0(zero) right up to 8(eight). The results are
given below in a tabular format, followed by a graphical representation.
Number of clients connected to the server.
|
Time
taken (in seconds) to solve 10 equations. |
0
|
340.525
|
1
|
132.95
|
2
|
80.2574
|
3
|
37.3861
|
4
|
20.8911 |
5
|
13.2871
|
6
|
9.9505
|
7
|
7.56436
|
8
|
5.38614
|
As you can see, the time taken to
solve the equations reduces as the number of clients connected to the
server increases. Thus, showing that the implementation is fairly
scalable, and will perform well under various loads with many clients
connected to the server(master) machine.
Shown below is the tree-hierarchy structure for the arrangement of
clients wrt the server(master) machine that will result in optimal
performance.
9. Future work
These are the areas which we shall be
concentrating on in the near future. Any help in these or other related
areas is greatly welcomed, and will be highly appreciated.
- Optimizations:
- Network
speed test: This
should test the speed between each client, and the server by sending
ping like packets.
- Client
speed(CPU speed) test: This should test the speed of the client
in terms of CPU speed.
- Client
memory(RAM) capacity test: This should test whether the client
machine has enough memory to
handle the request being sent to it without making sufficient use of
it's swap file.
- Load Balancing:
- This algorithm should balance the
load between the various clients by relinquishing some unused clients
in some server to some other client who needs them(and their processing
speed) to distribute its work-load.
- Fault Tolerance:
- If some client goes down while
evaluating the determinant, then the server should immediately
recognize this situation, and take remedial steps such as sending the
request to another client if there exists a free client or queuing up
the request for a client as soon as some client gets free, or to
evaluate the determinant itself.
10. Conclusion
We have seen the implementation of an
algorithm which solves a system of linear equations on distributed
systems. The test results show that it is more efficient compared to
the serial
algorithm, which executes on a single machine. We have also computed
the asymptotic upper bound for both the approaches, and have seen that
given a greater number of processors, the asymptotic upper bound for
out distributed algorithm tends towards n2,
and compared to
nn
for the
serial algorithm.
We have also seen the timings for solving 9 equations in 9 unknowns on
a distributed system, each containing a different number of clients. We
observe that as the number of clients increases, the speed of the
algorithm also increases, thus showing that the algorithm is scalable.
We would have liked to perform the tests with an SMP/server system as
the master, but such a computer was not available at the time of
testing.
Future work in the areas of optimization, Load balancing, and creating
a Fault tolerant system will be encouraged, and greatly appreciated. We
hope to accomplish the points mentioned in (9) in the year to follow.
There is some scope for improving the algorithm of finding the
determinant, and improvements which use properties of determinants to
eliminate redundant calculations will be encouraged, and implemented.
For example, one optimization already in place is that if the element
with which the determinant of a sub-matrix is to be multiplied is 0,
then the value of the determinant is not calculated, thus saving a lot
of time. This will prove highly beneficial for sparse matrices. Another
area that has been explored is cutting down the number of iterations,
and network data flow. When we wish to calculate the determinant of a 3
X 3 matrix or a square matrix of a smaller dimension, then the formula
is used directly instead of using the recursive function.
We would also like to explore the possibility of using a grid based
approach instead of the current tree-like hierarchy based approach,
since we believe that it would alleviate the problem of load balancing
to some extent.
11. Acknowledgments
The author would like to thank Siddharth Shah for introducing him to
the world of clusters, grids, and helping him out with the basics of
Networking in computers, without which this project would never have
been possible. This project was actually made because Siddharth wanted
to do something related to networking, and I wanted to do something
related to Algorithms. So, we reached a compromise, and this baby was
born! I would also like to thank Apurva Mehta, who helped me test the
initial client-server network model, which I had implemented in C++.
Thanks to Aniket for proof reading this document, reporting the
mistakes and helping me explain certain concepts in a better manner. My
mom needs a special mention, because she was the one who reminded me
that there existed something called food while I was busy thinking
about the whole concept and later implementing the ideas.
We would like to pay our tributes to Dr. Cramer, without whom this
project would never have been possible!
12. References
[MFA2001] Mark F. Adams. A Distributed Memory Unstructured Gauss-Seidel
Algorithm for Multigrid Smoothers. August 17, 2001.
[DAB2002] David A Bader, Bernard M.E. Moret, and Peter Sanders.
Algorithm Engineering for Parallel Computation.
[LN012003] Lecture notes. Csanky's Algorithm: matrix determinant € NC2.
10/14/2003.