Collector Bot 2007 (Robot Ramble 2007)
|
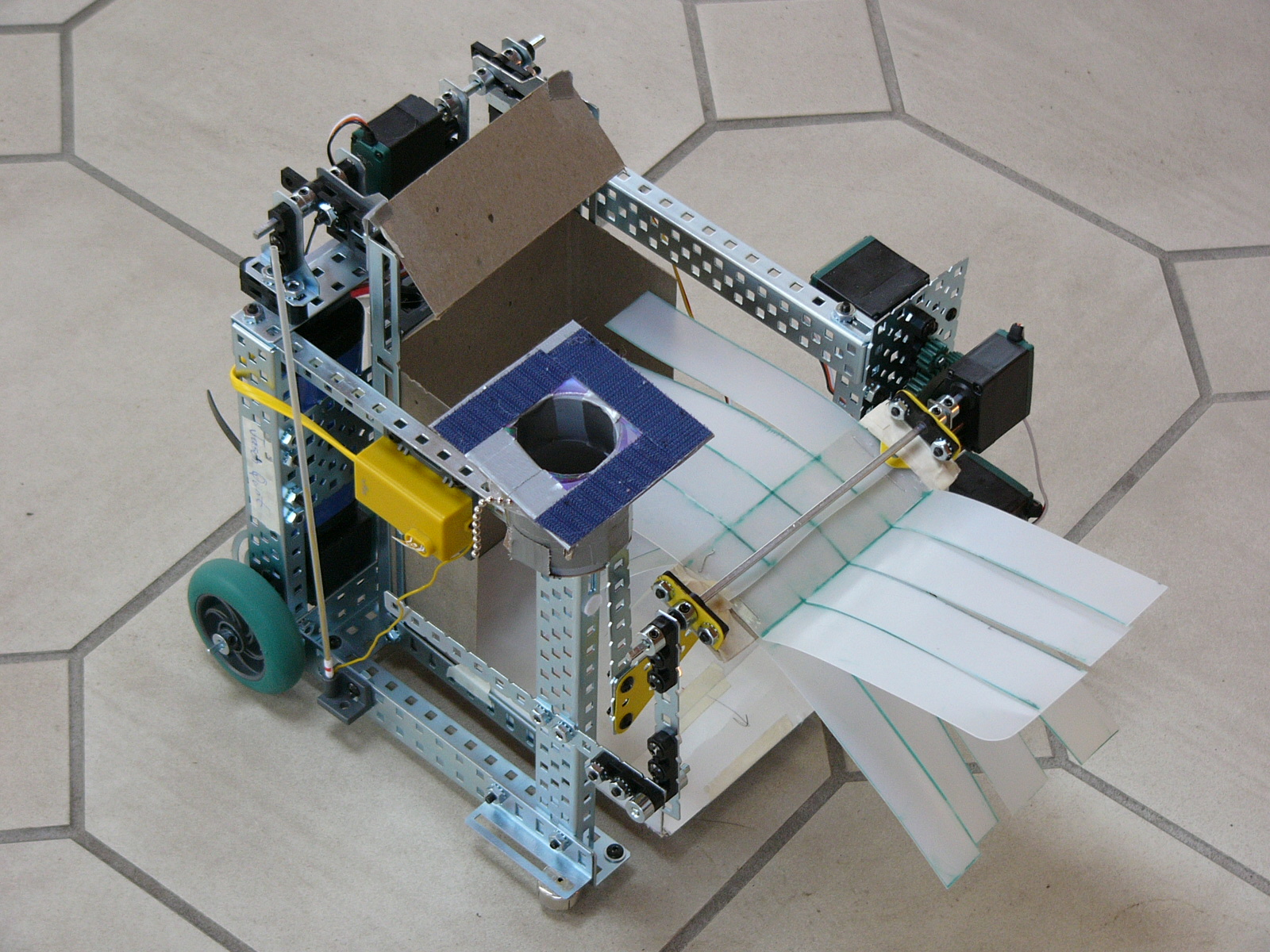
Once again this year, I participated in the Science Olympiad Robot Ramble event, which involved building a remote-controlled robot that could pick up various items arranged on a playing field and deposit them into a goal box. I spent the time from early October (when the event rules were released) through mid December planning my approach to the competition. I began constructing the robot on January 1st after a Rose Bowl party. After technical failures with an overcomplicated design last year, I decided to focus on the mantra K.I.S.S. (Keep It Simple Stupid). With this in mind, I decided to forgo any onboard microcontrollers (such as the BASIC Stamp or OOPic that I have used in the past) that would give the robot a degree of autonomy. My experience in the past few years has been that these microcontrollers have been difficult to program and they have required an enormous amount of messy wiring that has been a considerable headache to inspect when problems have arisen. The only electronics I would use this year would be a simple aircraft radio transmitter and receiver (on ground frequency). Having made these decisions, I decided to build my robot using parts from a VEX kit I received a few years back for my birthday. Thinking back to the 2006 Regional Tournament, I decided to implement the design of another robot that used a large sweeper to collect all of the items, and a simple rotating dumper to deposit the items into the goalbox. This design is a perfect example of a robot built with the K.I.S.S. mentality. Event Specifics: This year, the event took place on a 4 by 8 ft carpet rectangle. The objects to be retrieved and deposited into the goal box included 2 ping pong balls, 12 corks, and a CD-ROM with 10 pennies stacked on it. Additional points could be received by popping the three red balloons in the goal box, and even more points received by removing from the bin a fourth, blue balloon. A photo of the field can be found here: Playing Field Robot Description: As I said above, the robot was built using VEX metal and electronic parts. The robot has a four wheel, rear wheel drive system, powered by two VEX motors. At the front of the robot, running crosswise is an axle which is attached to multiple pieces of flexible plastic that acts as a sweeper when powered by a motor. This entire sweeper assembly is situated upon two short metal brackets extending forward from the sides of the robot. Powered by a servo, these brackets rotate up and bring the sweeper close to the robot so that the vehicle fits within a 30 cm x 30 cm x 30 cm cube at the start of the competition as required by the rules. In addition, there is a tray that rests in the middle of the robot just above the floor. The robot sweeps into this tray all of the items on the playing field except the CD-ROM. Also, at the start of the competition, two balls of tacky from which protrude multiple exacto knife blades lie in the tray. At the end of the competition, when the robot dumps all of the items it has collected into the goal box, these spike balls pop the balloons. The only slightly complicated part of the robot, and the part that was the hardest to design and build, is the CD arm. Across the front of the robot, there is a servo-powered L-shaped metal arm, with a short length of PVC pipe and a flat velcro surface attached at the end. At the start of the competition, multiple velcro strips are attached to the velcro on the CD arm, leaving their opposite, sticky sides exposed. During the competition, the CD arm rotates, and the PVC pipe slips over the stack of pennies and the the velcro strips' exposed sticky surfaces affix to the CD. This effectively traps the pennies, preventing any of them from escaping the robot's grasp. Near the end of the competition, I drive the robot over to the goal box and simply rotate the arm until the CD and the pennies are completely within the constraints of the cube. Even though the CD and pennies are not released from the robot's grip at the competition's end, I still receive points for these items because they are within the boundaries of the cube. |
More Pictures
Back to Main Page
{kind=link}