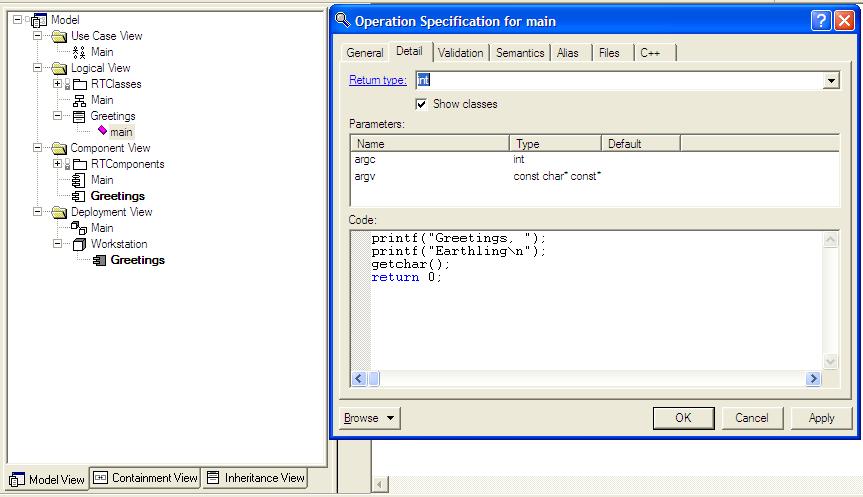
Deve-se criar uma nova classe denominada Greetings com um método main. Tal método é conhecido por "operation" no contexto do Rose RealTime. A criação da classe e a definição do método podem ser observadas na figura 1.
Figura 1 - Especificação da operação main da cápsula Greetings
Não deve-se esquecer de inserir as bibliotecas necessárias através do código #include <stdio.h> no item Implementation Preface da Tab C++ da especificação de cápsula HelloWorld.
O resultado da saída do warmup pode ser visto na figura 2.
Figura 2 - Saída com o cumprimento "Greetings, Earthling"
Agora é feita a alteração no código gerado pelo Rose RealTime. O arquivo Greetings.cpp, localizado no subdiretório src do projeto é alterado, ficando conforme a figura 3.
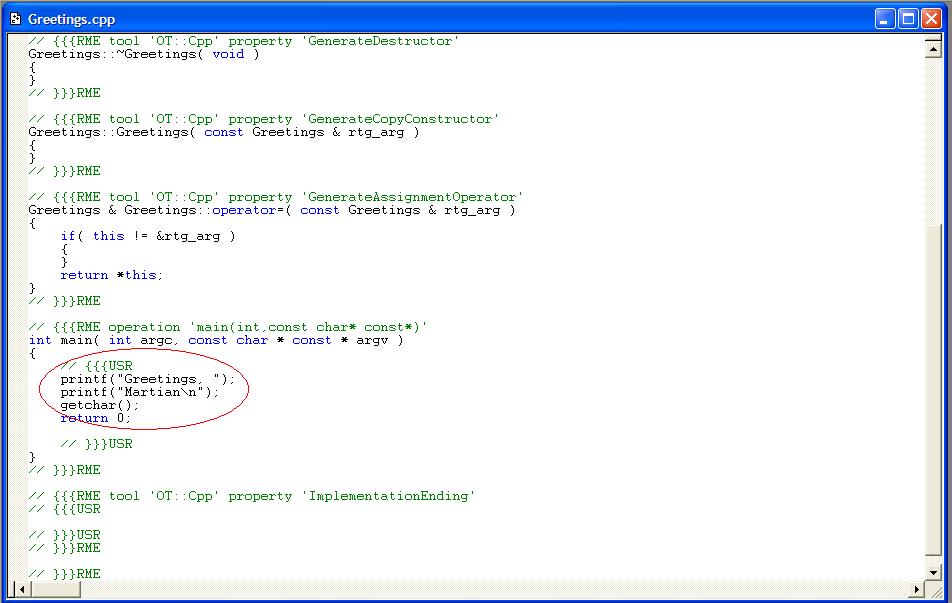
Figura 3 - Alteração do código gerado pelo Rose RealTime
Feita a alteração o modelo é novamente compilado, através de um comando nmake:
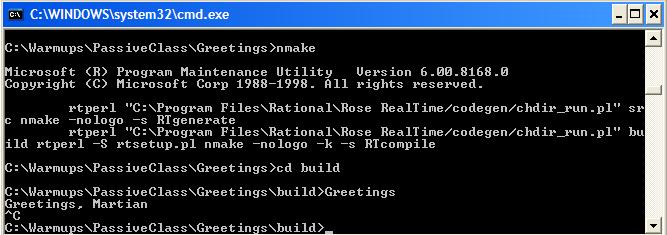
Figura 4 - Recompilação do projeto com o código alterado
Para que a alteração no código seja refletida no modelo do Rose RealTime, faz-se um Code Sync através do menu Build->Code Sync, no componente Greetings. O resultado de tal procedimento pode ser visualizado na figura 5.
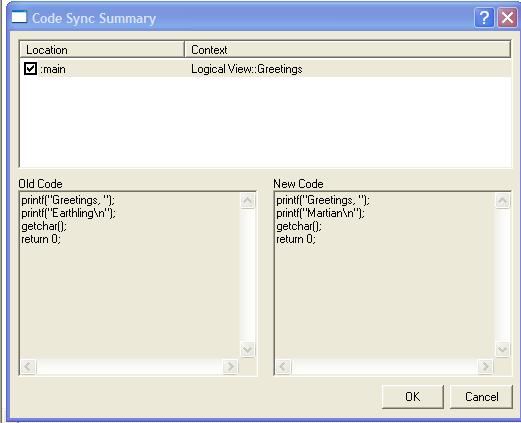
Figura 5 - Sincronização do código gerado fora do Rose RealTime
O modelo é então reconstruído no Rose RealTime, mantendo a mesma saída da figura 4, agora também atualizada.
Através deste warmup pôde-se construir uma classe passiva no Rose RealTime, e executá-la através do método main da mesma. Pode-se também alterar o código gerado pelo Rose RealTime e sincronizá-lo novamente através do comando Code Sync.