|
Publicado en Orbe el 18/07/2009 (versión ampliada) A González Arias
Escuchando bajo el agua
Diseñado en sus inicios con fines esencialmente militares, el sonar se utiliza actualmente en un sinnúmero de aplicaciones científicas, tecnológicas y comerciales. El nombre proviene del inglés Sound Navigation and Ranging[1] y es una técnica que emplea la propagación del sonido para navegar o detectar la presencia de navíos, peces u otros objetos bajo el agua. También se utiliza para construir mapas del fondo marino.
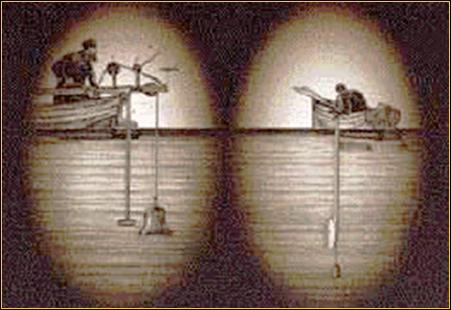
Medición de la velocidad del sonido en el agua. (Sturm y Colladon, 1826. Temperatura del agua: 2 oC.
El matemático francés C. Sturm y el físico suizo D. Colladon midieron por primera vez la velocidad del sonido en el agua en 1826. Sturm golpeó una campana inmersa en un lago a la vez que hacía una señal visual a Colladon, quien usando un detector sumergido logró medir el tiempo que tardaba el sonido en llegar a la orilla opuesta. El valor medido fue muy cercano al aceptado actualmente a esa temperatura (unos 1440 metros por segundo).
¿Cómo se transmite el sonido?
En el aire, cualquier fuente vibratoria (por ejemplo, un tambor o un altavoz) comprime y expande alternadamente las capas de aire colindantes, las que transmiten las vibraciones a las capas adyacentes, y así sucesivamente hasta recorrer grandes distancias. La vibración se desplaza a una velocidad de 340 m/s, creando una onda longitudinal que se atenúa a medida que se aleja de la fuente. Escuchamos los sonidos cuando la perturbación llega a la membrana timpánica en el oído externo y la hace vibrar, generando señales nerviosas que van al cerebro. Es posible describir las fases de compresión/expansión de las capas de aire en términos de su frecuencia en Hertz (vibraciones o ciclos por segundo, abreviado Hz). Nuestras cuerdas vocales pueden generar sonidos entre 100 Hz (sonidos graves) y 10 000 Hz (sonidos agudos) y el oído humano puede detectar de 20 a 20 000 Hz. Perros y murciélagos pueden escuchar frecuencias ultrasónicas, inaudibles para los humanos, de hasta 160 000 Hz, mientras que ballenas y elefantes pueden generar infrasonidos de menos de 20 Hz, también indetectables por los humanos. En el agua el sonido se propaga de la misma forma que en el aire, pero aquí las capas vibrantes, compuestas por moléculas de agua, transmiten la perturbación a una velocidad casi 5 veces mayor. Conociendo esa velocidad y midiendo electrónicamente el tiempo que tarda la onda en ir y regresar después de reflejarse (eco), se puede calcular la distancia hasta los objetos sumergidos. A similar intensidad de la fuente, los sonidos de baja frecuencia tienden a recorrer mayores distancias que los de alta frecuencia.
Mapeando el fondo del mar con el sonar
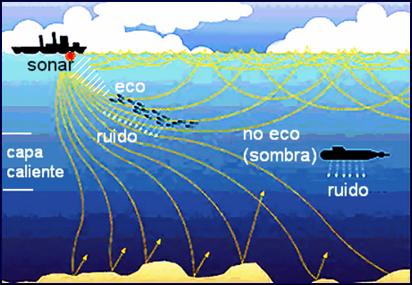
La velocidad de propagación de las ondas submarinas varía ligeramente con la temperatura y la profundidad. Estas variaciones pueden crear ‘zonas de sombra’, porque en las capas más calientes las ondas se desvían o refractan hacia la superficie, pero al llegar a regiones más profundas y frías, las ondas se refractan hacia abajo. Se crea así, a cierta distancia del emisor, una región intermedia ‘invisible’ (más bien inaudible) para el sonar.
Aplicaciones militares
El primer dispositivo de localización por eco fue patentado en Estados Unidos por la compañía Submarine Signal Company en 1914. Consistía en un oscilador eléctrico que emitía sonidos a baja frecuencia y que, a continuación, cambiaba a un receptor para escuchar el eco. Lograba detectar icebergs por debajo del agua a una distancia de 3 km, pero no podía determinar su dirección de forma precisa. A partir de ese momento los sistemas de detección submarina se fueron perfeccionando rápidamente, y ya en los inicios de la Segunda Guerra Mundial existían sistemas de sonar que podían captar el ruido de las hélices o el eco reflejado por el casco de un submarino a miles de metros de distancia. En el verano de 1937, durante maniobras militares en aguas costeras próximas a la bahía de Guantánamo, surgieron problemas con el sonar del buque USS Semmes que los oficiales a bordo no podían explicar ni corregir. Por alguna razón desconocida, la eficacia del sonar disminuía sistemáticamente por las tardes; a veces hasta reducirse a cero. El ejército pidió ayuda a los oceanógrafos para investigar el desconcertante efecto, quienes encontraron que al comienzo de la tarde el sol ya había calentado una capa de agua superficial, de 5 a 9 metros de grosor, a una temperatura de 1 a 2 grados centígrados por encima de la del agua que se encontraba debajo. Bajo esta capa superficial caliente el agua se enfriaba rápidamente a medida que aumentaba la profundidad. Como la velocidad del sonido aumenta con la temperatura, los científicos descubrieron que las señales emitidas por el sonar se desplazarían con mayor velocidad a través de la capa caliente y disminuirían drásticamente su velocidad al entrar en contacto con la capa inferior más fría. También encontraron que las ondas sonoras se refractaban alejándose de la región en la que la velocidad del sonido era mayor, desviándose hacia la región donde la velocidad era menor. Por esta razón, cualquier submarino que se encontrara situado justamente por debajo de la superficie que separa la capa caliente de la fría no podría ser detectado por las señales del sonar (la zona de sombra acústica ya mencionada, ver figura).
Difracción
de las ondas sonoras
En los años 50 se creó el sistema Sound Surveillance System SOSUS (Sistema de Vigilancia por Sonido), formado por un conjunto de micrófonos submarinos o hidrófonos colocados en el lecho oceánico en diversas partes del mundo y conectados por cables submarinos a centros de procesamiento en tierra. Mediante el sistema fue posible no sólo detectar submarinos, sino también conocer cuantas hélices tenía, si era convencional o nuclear, e incluso el tipo de submarino de que se trataba. El SOSUS se ha utilizado recientemente para estudiar los movimientos de las ballenas, pues puede detectar sus sonidos a más de 1000 kilómetros de distancia.
El sonar en la naturaleza
La naturaleza creó su propio sistema de sonar mucho antes que lo hiciera el hombre. Los delfines poseen un sistema de ecolocalización que les permite diferenciar el tamaño de pequeños objetos metálicos del tamaño de una moneda. Para entender la naturaleza de un objeto, un delfín se moverá alrededor del mismo generando ondas mediante chasquidos que produce en un órgano vecino al conducto nasal. La vibración pasa primero por una cavidad en la frente del delfín, que la enfoca como si fuera una lente. Cuando la onda resultante encuentra un objeto aparece un eco, que al regreso es detectado por una cavidad llena de grasa en el maxilar inferior. El eco llega hasta el oído interno y de ahí a su cerebro en forma de impulso nervioso. Además de diferenciar tamaños y evaluar la distancia hasta el objeto, el delfín es capaz de distinguir entre diferentes materiales y formas. Puede incluso cambiar la frecuencia de los chasquidos para adaptarse a diversas situaciones. Sin embargo, el sistema de sonar de los delfines no es capaz de detectar las redes de pesca, por lo que muchas veces quedan atrapados en ellas accidentalmente. Para prevenir estos accidentes se emplean actualmente redes equipadas con esferas plásticas, diseñadas para reflejar y amplificar sus señales de ecolocalización.
Sistema de
ecolocalización del delfín
Otros detectores submarinos
El sonar no es el único detector submarino creado por la naturaleza. Los peces ciegos de caverna de la especie Astyanax Fasciatus pueden percibir su entorno mediante pelos cubiertos de gel que recubren sus cuerpos. Su habilidad para nadar en un ambiente sin luz y detectar objetos sumergidos motivó a un grupo de investigadores de la Escuela de Ingeniería y Ciencia de los Materiales del Instituto Tecnológico de Atlanta, Georgia, a tratar de imitar esos pelos con materiales sintéticos. Según un reporte de marzo de este año presentado en la American Physical Society, ya han logrado construir ocho microsensores que los imitan, demostrando que con ellos es posible detectar objetos oscilantes sumergidos. Los miembros del grupo de investigación alegan que los pelos “son mejores que el sonar activo, que necesita mucho espacio, emite fuertes señales acústicas que podrían tener un efecto perjudicial en el entorno, y resulta inapropiado para aplicaciones que requieran silencio". Consideran que los sensores podrían tener una amplia variedad de aplicaciones submarinas, tales como seguridad portuaria, vigilancia marítima, detección temprana de tsunamis, inspección autónoma de plataformas petroleras, navegación de vehículos subacuáticos autónomos e investigaciones marinas de todo tipo.[2]
|