THE GEOMETRY OF THE SPECIAL RELATIVITY
This text is for people that knows the elements of the special relativity.
In the formulas of the special relativity, often it appears expressions like:
v / c and being c the light velocity and v the speed of the inertial system with
respect the reference frame.
For instance, in the Lorentz transformation tensor :
 being a= 1/
being a= 1/![]() and b = - a v/c
and b = - a v/c
Remembering trigonometry, it is possible to identify
both expressions with functions in the way: v/c = sin w and therefore (1- v2/c2) 1/2
= cos w.
Since in relativity must
be v £ c , v/c varies between
0 and 1, the same that sin w.
Then a and b are transformed to
a= 1/cos w y b = - a v/c = - sen w / cos w = - tg w
Now, the coordinates transformation with the Lorentz tensor is as follows:
being x’’,y’’,z’’,t’’ the coordinates of a point in the inertial system at velocity v relative to the reference frame and x’,y’,z’,t’ that coordinates in the reference frame .
Multiplying by cosw both members of the equation:
This pattern of tensor is projecting the coordinates of the inertial system over an axis that forms with it an angle w. On will return on this item later.
Developping the tensor we get:
x’’cos w = x’-ct’sinw y’’= y’ z’’=
z’ ct’’cos w = ct’ – x’sinw
that are the same that the classic transformation formulas.. We can see the simplification on notation:
 y’’=y’ z’’=z’
y’’=y’ z’’=z’ 
The expressions of the length contraction and time dilation are:
l = l0 cos w and
t = t0 cos w that are projections over an axis at
angle w.
And for the mass:
m= m0 /cos w At speed c , cos w=0 and the mass observed from the reference frame becames ¥.
For the determination of speeds composition and in the cases when differentiation is necessary, the calculations are simplified using the trigonometric functions.
The speed’s composition if v is parallel to the x’ axis (vy =0, vz =0) should be, differenciating respect to t’’:
![]()
![]()
Being u’’ the speed of a point P with respect the inertial frame x’’- y’’ which is moving at speed v with respect the reference frame x’-y’. We look for the speed u’ that an observer standing at the reference frame sees for P, or that is the same, the adition of v and u’’. . In Galilean geometry u’=u’’+v. But not in relativity.
From the last row doing u’=dx’/dt’ and u’’ = dx’’/dt’’
c cos w = (- u' sin w +c) dt'/dt".
Dividing by c and clearing :
dt'/dt" = cosw /(1- u'/c.senw) but u'/c as all the speeds can be expressed in functión of a sinus. Let be u'/c =sen a (a is not the constat of the Lorentz tensor now ).Then:
dt'/dt" = cos w/(1-sen a.sen w). Doing the sustitution of dt’/dt’’, dividing both terms by cos w and passing the denominator to the first member:
![]()
doing now u"/c = sen b and dividing by c in both members we get:
![]()
And now, developping the firs line:
sen b = (sen a - sen w) / (1 - sen w.sen a) (1) or as we look for sen a:
sen a= (sen w + sen b) / (1 + sen w.sen b ) (2) or
sen w.sen b sena =sen w + sen b - sen a
This is an interesting expression for the
velocities composition.
Doing the substitution of the sinus by
the speeds in (2) we get:
![]() and multiplying by
c :
and multiplying by
c : ![]() that is the
classical presentation of the speeds composition. In apendix we give a graphical way for the composition based in
the use of our method.
that is the
classical presentation of the speeds composition. In apendix we give a graphical way for the composition based in
the use of our method.
Going back to the beguining of the text with
v/c = sin a
and remembering that sin2
a + cos2 a = 1 we have
![]() . Being cosa a function that varies between 0 and 1, it
is possible to identify it to a speed in the way u/c = cosa getting the expression v2/c2 +
u2 /c2
=1 or
. Being cosa a function that varies between 0 and 1, it
is possible to identify it to a speed in the way u/c = cosa getting the expression v2/c2 +
u2 /c2
=1 or
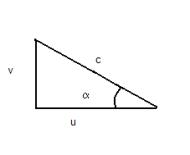
v2
+u2 = c2
We have now a right triangle with leg s v and u and hypotenuse c, being u the projection of c over an axis with the angle a.
But what could represent the speed u?
Putting the expression in differencial way we have:
v=dx/dt u = dw/dt
(dx)2 + (dw)2
= c2 (dt)2
or (dw)2 = c2 (dt)2 - (dx)2
but dw is what classicaly has been defined as the invariant “universe interval” ds.
Let’s see now the speeds triangle
The universe is only energy, space and time. Then we can assume only two coordinates: space and time. If v is the speed on space, we can assume that u is a speed on time. But, how can the time to be consideresd orthogonal to the space?
To answer this, we can imagine the time as something flowing from each point of the space as a spherical shape or wave, being in this way always orthogonal to a any system of cartesian axes that we can consider in the space with the center in the point.
Then, if the v direction is the space axis, and u direction the time axis, one can think as u being a speed with respect the time. So, if v=0 then u=c, or the standing observer looks the time in its point travelling at speed c. But if v=c, then u=0 that is, the inertial frame is going at speed c with respect to our reference frame but the speed with respect to the time is zero because both are moving at the same speed: it is moving with our time and for this reason at the light speed the lapse of time with respect to an standig observer does not go ahead. For instance : in a photon .
That is too the result of t0 = t cos a for v= c being sina =1, a= 90º and cos a=0, t=µ.
This is equivalent to the standing observer seing the inertial system with the space and time axes turned an angle a as represented in the figure. If the inertial system has speed c, its space axis being turned 90º is coincident with our time axis.
In the figure, the space axes are e for the reference frame and e’ for the inertial system and the respective time axes, t and t’; the right triangle of speeds OAB (OA = v, AB = c.; OB=u) and OL is an initial length in the e axis, which after turning an angle a is seen by the standing observer as OL’ = OL cos a.
In the time axis OT = t0 = m0 = E0 (time, mass and energy) is the projection of t, m and E equals to OT’ on the time axis of the inertial system, turned also an angle a, remaining space and time always orthogonal.
(To note that the Minkowsky interpretation of special relativity needs an imaginary time and hyperbolic trigonometric functions. Our way does not.)
Being OA = v and AB = c, sina = OA/AB, OBA = AOL’ = BOD = a and then DO = DB =DA = c/2.
Let’s see now a way to draw graphicaly the coordinates change from x’’ to x’ and t’’ to t’.
The Lorentz tensor for two coordinates (y=0, z=0) is:
![]()
and developping:
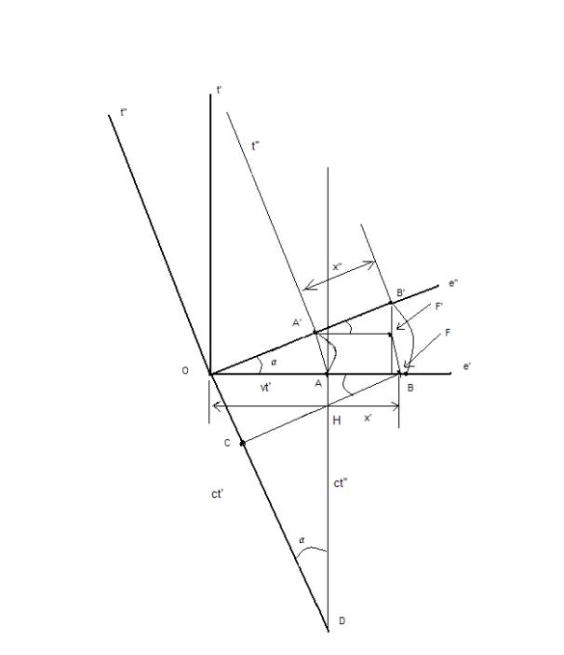
x’’cosa = x’ –ct’sina and ct’’cosa = ct’ – x’sina
Going to the reference frame e’-t’ in the following graphic, OA = vt’. The inertial system e’’-t’’ has moved OA at speed v but we look at it as turned the angle a = A’OA defined by sin a = v/c. The coordinate x’’ =AB after turning is A’B’. In the galilean system we had that x’=vt’+x’’. Now x’=x’’cosa + ct’sina = x’’cosa + vt’
( As v= c.sin. a).
In the triangle A’B’F’ is A’F’ =x’ cosa and as OA’ = vt’ we have that
x’=OA’ + A’F’=OF drawing a parallel from F’ to AA’. And drawing a perpendicular from F to OD we get OC = x’sina.
Being ct’’=(ct’ – x’ sina)/ cosa and ct’=OD, CD = OD – OC = ct’ – x’ sina and then
CD/ cos a =CH = ct’’ . This way is possible to see the length contraction OF<OB and the time dilation CD <DH.
.
If we use light-time to express the lengths, all is still simpler. Let be
x' = c tx', x'' =c tx'' the transformation formula is now:

and dividing both sides by c:

and developping
tx''cos a = tx' - t' sin a t'' cos a= t' - tx'sen a
or tx'' = tx' - t' tan a t'' = t' - tx'tan a
The graphic construction is also simplified:
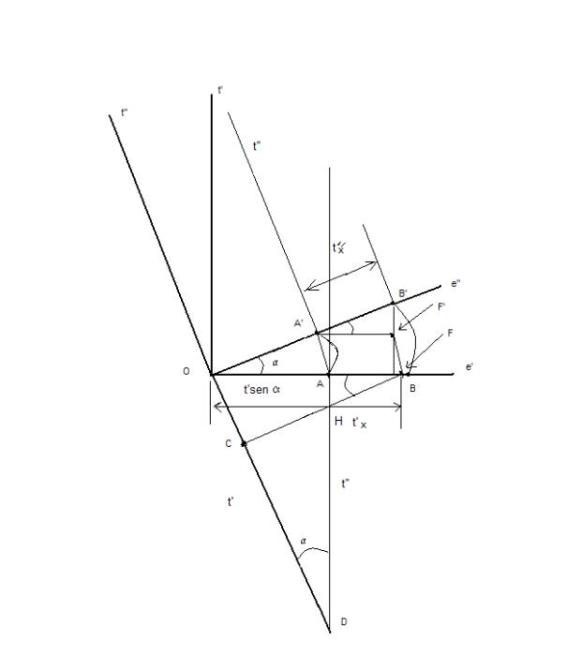
Now OA =vt' =t'c sena and in light-time OA = t' sen a
and tx' = tx''cos a + t' sen a = OA + A'F' = OF OD = OA/sen a=t'
OC=OF sen a DC = t' - tx'sen a HD =DC/cos a = t''
Let us go now to the energy expressions. We have in the classical way:
E= total energy
 being
being ![]() the rest mass and m the mass at speed v as observed from
the reference frame.
the rest mass and m the mass at speed v as observed from
the reference frame.
Using our conventions:
E= m0 c2 /cosa = mc2 and then as seen before m0 =m.cos a
When introducing the momentun p, the classical fomula is:
![]() or E2 = E02 + (pc)2 being E0
the rest energy.
or E2 = E02 + (pc)2 being E0
the rest energy.
This can be easily deduced from our right triangle of sides u,v,c
which acomplishes:
v2 +u2
= c2
M ultiplying each side of the triangle by mc we get a similar triangle with sides mcv, mcu, and mc2 that form too a right triangle which hypotenuse is mc2 . In this triangle we can write:
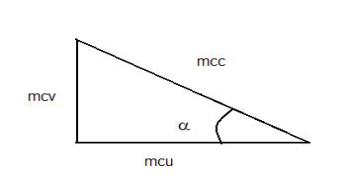
(mc2)2 = (mcv) 2 + (mcu) 2 but being u = c cos a mcu = m c2cos a but mcosa= m0 and p=mv we have then:
E2 = (pc) 2 + m2c2cos2ac2 = (pc) 2 + ( m0c2 ) 2 being E= mc2 and m0c2 =E0 we get finally:
E2 = E02 + (pc)2
The same that the classical formula.
We have used only the previous knowledge of m.cos a= m0 and E= mc2
Other calculations can be simplified using the method described .
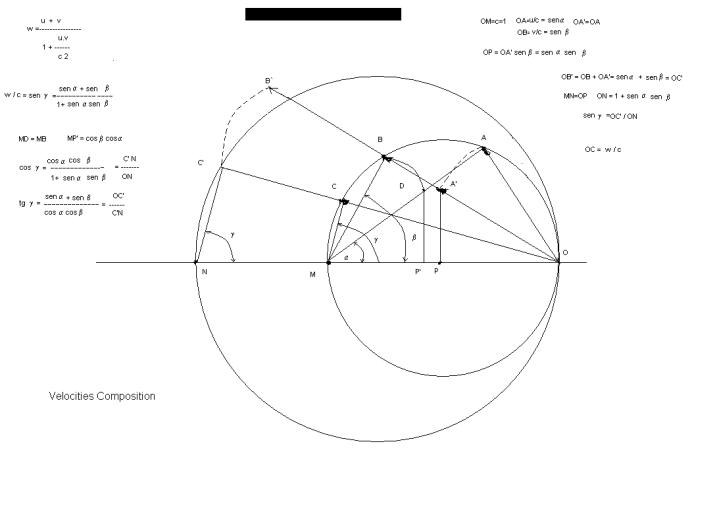
Appendix
In the attached drawing it is described the velocities composition based on the trigonometrical method.
In a circumference of diameter OM = c = 1 we
trace OA = v/c =sina
and OB =u/c = sinb. Drawing OA’ = OA on OB and projecting this on OM, the segment OP=OA’sinb =
sen asenb.
Drawing now MN=OP at the prolongation of the diameter OM, we have ON =
1+ sen a senb. Adding OA in the direction OB we get OB’ = sin a + sin b. Now, drawing a circumference of diameter ON passing at O and center in
OM and tracing OC’ = OB’ we see that OC’/ ON = = (sina + sin b) /(1 + sin asin b)
= sin g. Finally, a parallel from M to
MC’ gives the angle OMC= g where
OC/OM = sin g
or u’/c =OC/OM and being
c=OM=1, OC = w, the composition of the two velocities u and v as seen from the
reference frame.
In the same way it is possible to compose the
speeds with respect the time, cos a and
cos b
giving as result
MC = cos g = ( cos a cos b) / (1 + sen a sen b).