 |
Inside
Shenzhou Spacecraft |
|
Inside
Shenzhou Spacecraft |
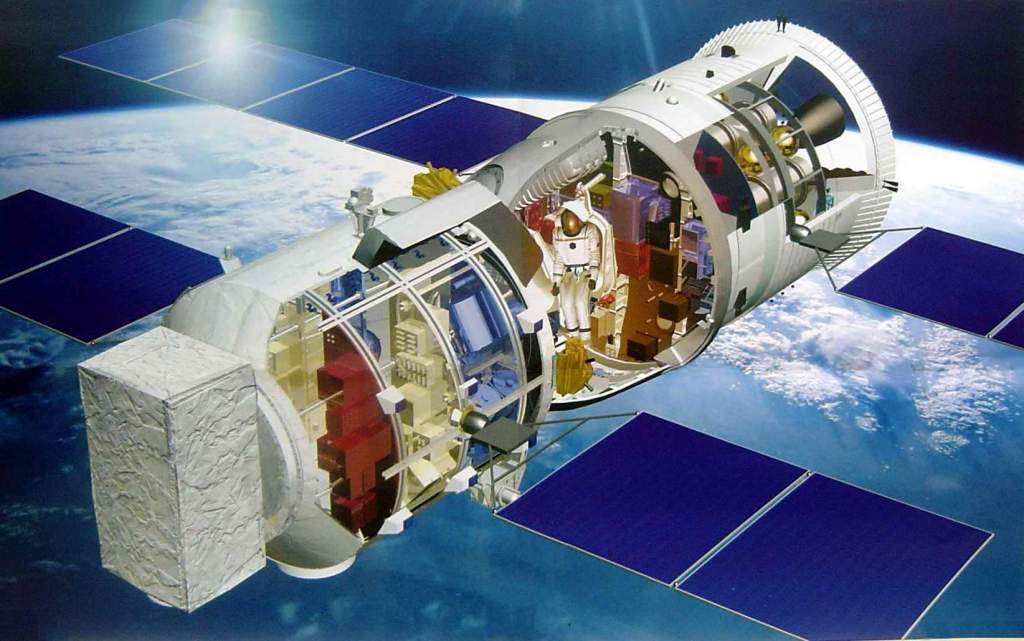
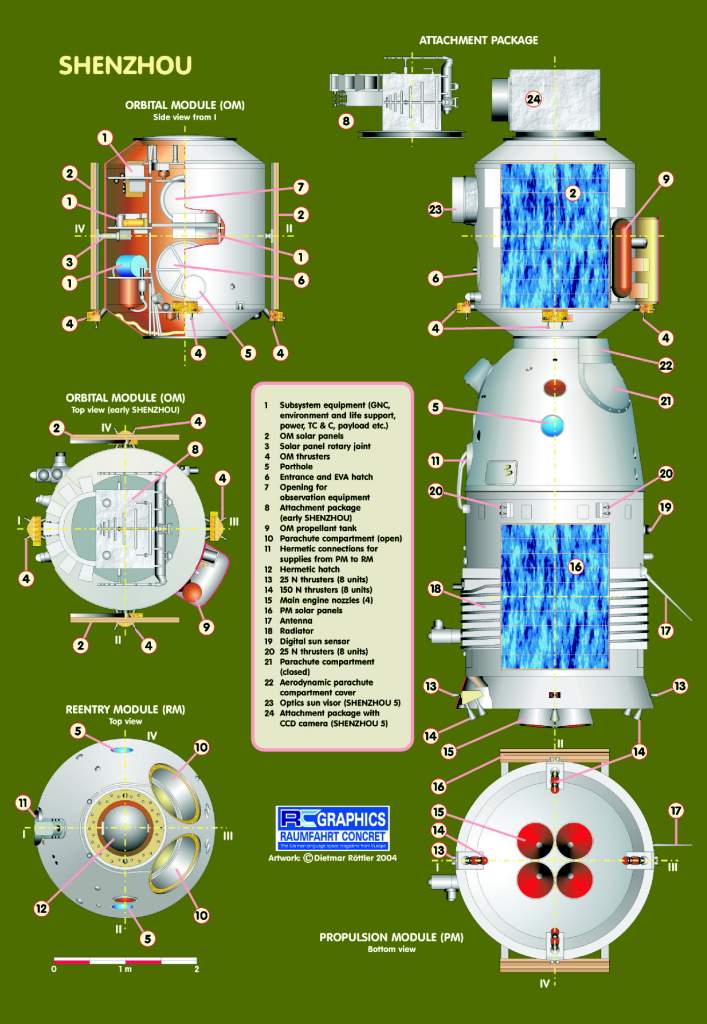
The
Shenzhou
spacecraft consists of four parts: the propulsion module, the reentry module,
the orbital module, and the attachment package on top the orbital module. Its
overall size can be found in following figures.

Actual
length and mass of the spacecraft varies. For example, length of Shenzhou 1 and
Shenzhou 2 is about 9.45m while length of Shenzhou 5 is about 9.2m. Launch mass
of Shenzhou 4 is 7794kg while mass of Shenzhou 5 is about 7840kg.
The
orbital module is a cylinder with truncated conical sections at both sides. Its
diameter is 2.25m and length 2.8m. There is a hatch for ingress and EVA, and
two portholes on the cylinder section. On the exterior of the module, there are a
pair of solar panels with span of 10.4m, a propulsion package containing
propellant tanks, Earth and Sun sensors, and a set of orbital maneuver and
attitude control engines. Inside the module, there are three layers of racks to
install equipments and payloads.
The
reentry module is bell shaped. Its L/D (lift-drag ratio) is about 0.3 at attack
angle of 20 degrees. Its maximum diameter is 2.517m and length is 2.5m. There is
a 0.65m inner-diameter hatch at top, two portholes, an optical sight window, and the main and reserve parachute compartments. There are
also six antenna mounting bases, a set of attitude control engines, the
umbilical connector panel linking electrical/gas/liquid pipelines to
the propulsion module, sensors and antennas, and the gamma ray altimeter and
soft landing motors at bottom. The module is covered by ablative thermal
protection materials. Inside the module, there are three seats, the control
panel, the camera at sidewall, and gas bottles used during reentry. Most
subsystem equipments are installed under the seats. Its interval volume is about
6m3.
The
propulsion module is a non-pressurized cylinder with a truncated conical segment
at bottom. Its length is 2.941m, maximum diameter is 2.8m (at bottom). A pair of
solar panels with span of about 17m and a radiator is installed on exterior of
the module. There are four main engines at bottom of the module and a set of
attitude control engines at its side. Inside the module, there are multiple
disk-shaped structures arranged along the module's axis, to install various subsystem
equipments.
The
attachment segment, normally non-pressurized, varies for individual missions. For
example, the Shenzhou 5 attachment was a box with size of 0.9x1.268x0.86(m) in
which a 1.6m resolution CCD camera was installed. It can be a docking mechanism
in future.
Shenzhou spacecraft has 13 subsystems. Detailed descriptions of these subsystems are in sections below.

Shenzhous
pressurized modules use semi-monocoque structure. For example, structure of the
reentry module consists of titanium framework, aluminum alloy made sidewalls,
the air-tight bottom and the heat shield.
Shenzhous
reentry module uses ablative thermal protection technologies.
Maximum
working temperature on sidewall of the reentry module, made by aluminum alloy,
is about 200°C.
It is covered by honeycomb-reinforced silicon based low-density ablative
materials. Its ablative density varies from 0.72g/m3 at windward side
to 0.56g/m3 at leeward side. There are more than 20 portholes, holes
and covers at the module. Thermal protection rings made by medium-density
(1.3g/m3-1.4g/m3) metlbond-glass composition material are
used on these locations.
The
heat shield at bottom of the module is the critical component with maximum heat
load. It consists of the ablative layer, the base structural layer and the
thermal protection ring at its edge. The ablative layer is 35mm-thick fiberglass
honeycomb filled with silicon-based ablative material with density of 0.75g/m3.
The base structural layer, used to withstand load and isolate heat, is
30mm-thick fiberglass sandwich structure. The thermal protection ring is made by
short fiberglass and metlbond resin.
Total
mass of the thermal protection layers covering about 22m2 is 450kg.
Shenzhou
uses the non-recyclable environment control and life support system. It has 9
subsystems including gas supply and pressure control, ventilation and
purification, temperature and humidity control, spacesuit loop, water
management, food management, waste processing, smoke and fire monitoring and
removal, measurement and control.
Both
the orbital and the reentry module are pressurized. The cabin atmosphere is at
91±10kPa
with oxygen pressure of 20-24kPa. It keeps temperature of 17-25°C
(less than 40°C
when reentry), humidity of 30%-70%, and maximum noise level of 125dB during
launch and reentry, and 75dB during in-orbit operation. Maximum axial overload
is 4g during normal lifting reentry, 11g during ballistic reentry, and 17g
during emergency escape.
High-pressure
nitrogen and oxygen gas bottles, at pressure of 21MPa, are made by high strength
alloy steel. They are located in the propulsion module.
It
is estimated that total heat inside the Shenzhou spacecraft is equivalent to
about 1000W. There is a cooling system consisting of coldplates under
equipments, condensers and desiccators inside the pressurized modules, sensors
and controllers, pipelines linking to the heat exchanger, and the radiator
installed on exterior of the propulsion module. On the orbital module, there are
thermal control louvers. Shenzhou also uses other active or passive
thermal control technologies, such as thermal control coating, multi-layer
thermal isolations, fans and electrical heaters etc.
Shenzhou
GNC system includes digital and analogy Sun sensors, infrared Earth sensors,
strapdown IMU, the hot-redundant GNC computer, attitude engine control system, and the
manual control system.
The
GNC computer is a three-unit hot-redundant fault tolerant computer using
majority voting.
The
manual control system includes optical observation windows, control panel,
manual attitude control handles, the movement handle and their controller etc.
Shenzhou GNC system uses a series of new technologies including ascent control, in-orbit calibration of the strapdown IMU, fault diagnosis and system reconstruction, yaw maneuver control, L/D real-time prediction and self-adaptive reentry control etc.
Shenzhou
TC&C system consists of 6 subsystems: the in-orbit tracking and control
subsystem, the data transmission subsystem, the communication subsystem, the
rescue beacon subsystem, the mechanism parameter capturing and recording
subsystem and the orbital module tracking and control system.
The
tracking and control system includes the GPS receiver, the S-band transponders,
the C-band single-pulse radar transponder, telemetry equipments and antennas.
The orbital module tracking and control system is similar but without the GPS
receiver and the C-band radar responder. The data transmission system includes
data interfaces and the S-band transmitter. The Unified S-Band System (USB) is
used to transmit combines telemetry, command, voice and video signals within one
data stream. It is compliant to international standards.
The
communication subsystem includes the voice processing unit, the communication
headset, the video encoder, cameras, monitors, switches, the VHF communication
system and antennas. Video signals are encoded in ITU-T H.261 format and
transmitted in ITU-T H.221 format combined with voice signals. It then generates
a data stream at rate of 768kb/s that is sent to the data transmission
subsystem. Digital voice signals are encoded in 32KB/s, 24KB/s and 16KB/s, and
are sent to the data transmission system, the S-band responders and the VHF
system respectively. The VHF transceiver
transmits the 24kB/s combined data stream of biological data and voice as
backup of the USB system.
There
are three kinds of rescue beacons at the reentry capsule. One is the 243MHz VHF
beacon that sends orientation signals to the rescue helicopters. It starts
transmission once the capsule leaves the radio blackout, at about 40km above the
ground. The second is the HF beacon that sends position signals feed by the GPS
receiver to the ground rescue vehicles. The HF system can also transmit two-way
analogy voice signals during emergency. There are two erectable HF antennas at
bottom and side of the capsule, one of which is deployed after landing depending
on attitude of the capsule. The third beacon system is the 406MHz international
Emergency Position Indicating Radio Beacon. The crew can also use a handheld
emergency 406MHz beacon.
Shenzhou
data management system is a distributed computer network system based on the
1553B bus.
There
is a computer (CTU1 Central Terminal Unit 1) on the reentry module that
controls all tasks of the three modules during autonomous flight and
reentry tasks after the orbital module and the propulsion module are separated.
CTU1 is a three-unit hot-redundant fault tolerant computer using majority voting
to achieve the Fail Operational Fail Safe (FO-FS) requirement.
Another
computer (CTU2) at the orbital module is a two-unit cold redundant computer.
Control can be automatically switched to the backup unit if the main unit
fails. It controls tasks of the orbital module during the 6-month extended
mission.
There
are also 6 single-board-computer based remote terminal units (RTU), two at each
module, to collect data and transfer signals. There is a two-unit hot redundant
data transmission and control unit (DTCU) at the propulsion module to combine 6
data streams into a single 768kb/s high-speed data stream for the downlink.
There is an emergency data recorder (CRU Clamant Record Unit), the so-called
black box, to record various critical data from the reentry module. It has 10MB
solid-state memory and is able to withstand overload of 10000g and temperature
of 1200°C
for 30 minutes.
All these devices, and other 11 terminals of other subsystems, form a local area network (LAN) by the standard serial 1553B bus at data rate of 1MB/s. The bus has dynamic configuration capability. Three modules share a redundant 1553B bus during flight.
The
electrical power system consists of the primary power, the orbital module power,
the reentry and landing power, the pyrotechnics power and the emergency power.
The
primary power consists of two identical units, each of which has four solar
panels, or a single wing at side of the propulsion module, a set of
silver-zinc batteries and other equipments. Total area of solar array used by
the primary power is 24.48m2. The orbital module power has totally
four solar panels, two on each wing, at both side of the orbital module, a set
of nickelcadmium batteries and other equipments. Area of the orbital module
solar panel is 12.24m2.
Both
photovoltaic arrays use BSF (back surface filed) silicon solar cells with energy
conversion efficiency of 14.8%. Frameworks of the solar panels are made by rigid
aluminum honeycomb plates. There is a triangle frame at bottom to connect to the
modules. There are sun sensors between panels to measure angle between the
sunlight vector and the normal of the solar array so as to keep panels angle
or rotate them by the attitude control system. There is a diverter at the
triangle frame.
The
emergency power system is inside the propulsion module. It uses silver-zinc
batteries. It can provide six hours of power supply for the whole spacecraft in
case of the primary power fails. Reentry and landing power and pyrotechnics
power also use silver-zinc batteries.
All
power units supply electricity to a single spacecraft-wide electric network.
Voltage of the networks bus is 28V. Output power of three solar power units
is about 3.5kw.
It
is the first time for China to use solar cells, nickelcadmium battery and
silver-zinc battery on a single spacecraft and an electric network supplied by
three photovoltaic electricity generation units. It is the most complicated and
comprehensive power system on Chinese spacecraft.
The
orbital module has sixteen 5N thrust monopropellant hydrazine engines used for
maneuver, orbit keeping and attitude control, a 7-liter titanium gas tank
working at pressure of 23Mpa, and a rubber propellant tank. The engines are
divided into the main and backup groups.
The
reentry module has eight 150N thrust hydrazine engines used for attitude control
during reentry, two 4.5-liter titanium gas tanks working at pressure of 23Mpa,
and two rubber tanks capable of storing 28kg of propellant. Similar to that of
the orbital module, most equipment and the four roll thrusters near the bottom
are divided into the main and backup groups.
The
propulsion module is responsible for maneuver, orbit keeping, attitude control
and retrofire, as well as high altitude escape. It uses a shared bipropellant
supply system and has four 2500N thrust N2O4/MMH main
engines with specific impulse of 290 seconds, eight 150N thrust and sixteen 5N
thrust attitude control engines, six 20-liter titanium gas tank working at
pressure of 23Mpa, and four 230-liter variable-thickness, variable-curvature
metallic diaphragm-type propellant tanks working at pressure of 2Mpa. Except for
tanks, all are redundantly configured and are divided into the main and backup
groups.
Recovery
and landing system consists of structure, parachutes, soft landing rockets,
procedure control, pyrotechnics, airbag in the parachute compartment, and the
position indicating subsystems.
The
parachute system includes two pilot parachutes, the drogue parachute, the main
parachute, and the reserve chute. The ring-sail type main chute has area of
1200m2 and weights about 90kg. The reserve chute has area of 760m2.
The landing procedure is activated at altitude of 10km when the parachute
compartment cover is jettisoned. The two pilot chutes are pulled out first and
then the drogue chute. The main parachute is pulled out at last. After the heat
shield is dropped at 5-6km altitude, single-point hanging of the main chute is
changed to two-point hanging. The whole procedure reduces the capsules speed
from 200m/s to about 8m/s.
There
is a gamma ray altimeter at bottom of the reentry module. When the capsule is
about 1m above the ground, it ignites four solid fuel soft landing rockets at
bottom of the capsule. Final landing speed is around 3.5m/s. The shock-adsorbing
seats will provide protection in case soft landing rockets fail.
To
indicate location of the capsule, it has flashlight and dye marking materials to
be released when splashed on the sea.
Landing
precision is within an area of 30km by 15km.
There
are two emergency scenarios. The launch escape tower on top of the spacecraft is
used during ascent phase from ground to altitude of 110km. And the spacecraft
itself can handle emergency during final ascent phase, orbital operation and
reentry.
The
launch escape system includes the escape tower and the upper part of the shroud.
The tower is 8.35m in length and with six solid fuel motors. From up to down are
four control motors, the low altitude separation motor (eight nozzles), and the
low altitude escape motor(four nozzles). There are also six motors on the upper
shroud among which are two high altitude separation motors and four high
altitude escape motors. There are four aerodynamic flaps on the upper shroud.
They are deployed to stabilize the escape vehicle during its high speed flight.
The
low altitude escape mode is used below 39km, before jettison of the escape tower
at about 120 seconds after the liftoff. In this case, the upper shroud, together
with top two modules of the spacecraft will be separated from the lower shroud
and the propulsion module. Motors on the escape tower will be ignited to pull
the whole vehicle off the exploding launcher.
The
high altitude escape mode works without the escape tower. In this case, once the
upper shroud is separated from the launcher, it is the escape motors at side of
the shroud that bring the vehicle to a safe distance from the launcher.
If
emergency happens after jettison of the shroud, about 201 seconds after the
liftoff, or above 110km, the whole spacecraft separates itself from the
launcher, ignites its main engines at the propulsion module to keep it away from
the launcher. Then it makes an emergency retrofire during the first or second
orbit, or the non-standard 14th orbit. Emergency procedure during orbital
operation is similar. If the GNC subsystem fails to take action, manual control
can be applied to make a ballistic reentry. The emergency system can also abort
a reentry at initial stage if the first and the second reentry attitude
adjustment fails, to allows another try one day later.
Inside
the reentry module, there are emergency food, water, GPS receiver and
communication devices.
The
instrumentation and illumination Subsystem consists of the integrated digital
display system, individual (mechanical-electrical or electrical-magnetic)
instrument, manual handling and control system, and illumination equipments.
The
integrated digital display system, the most important part of the control panel
in the reentry module, includes two multi-functional color LCD displays. The
control panel controller is hot redundant. The LCD panels are capable of
displaying digits, text, icons, graphics and charts. It has a sophisticated user
interface, for example, various data views, pagination, the zoom-able world map
etc. Besides the LCD displays, there are various indicators, backup segmental
digit displays and individual instruments, buzzers, switches, buttons and
handles on the instrument panel. There is also a voice notification system to
report important information to the crew by voice (in Mandarin).
The
illumination system was designed ergonomically. All fluorescent lamps inside the
spacecraft are non-flashing and brightness-adjustable.
The
crew system includes taikonauts, space suits, space food, medical monitoring and
protection equipments, personal survival package, shock-absorbing cushion etc.
The
crew is up to three members. From left to right are payload specialist,
commander & pilot, copilot & flight engineer.
Space
food includes recipe food for normal usage, reserved food for the possible
extended mission, depressurization food for use inside the spacesuit, and
emergency food for survival after landing. They all are stored in the personal
survival package.
Space
suits include the pressurized suit, the survival suit, underwear, working suits,
headsets, and sleep bags etc.
The
medical monitoring system can monitor heartbeat, respiration, body temperature
and blood pressure of the crew. There are also medicines, health care stuff and
exercise facilities.
The
personal survival package, mainly used after landing, contains personal
emergency radio beacon, smoke generator, signal rocket, flash light, dye marker,
mirror, compass, life raft, pistol, knife, shark repellent, lighter, first aid
kit, food and water etc.
Payloads
vary on specific missions.
Zhu
Zengyi, Fei Tian Meng Yuan, Huayi Publishing House, Beijing, 2003
Qi
Faren, Manned Spacecraft Technology (second edition), National Defense
Industry Press, Beijing, 2003
CAST,
Shenzhou Spacecraft, Space International, November, 2003
Picture credit: Taikong Tansuo, Raumfahrt Concret
(An edited version of this article was published on issue 4/5, 2004 of Raumfahrt Concret. Part of the content was published on the April, 2005 issue of Spaceflight)