<--Previous
Up
Next-->
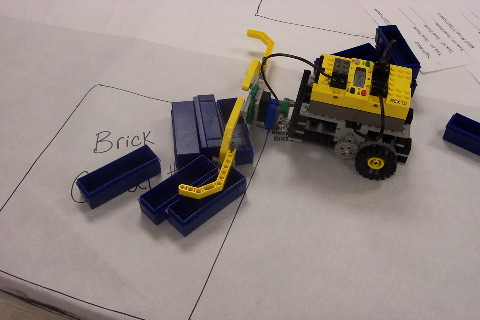
R&D rover completing task 1