|
|
|
�
Kenneth M. Sasaki 2001, Todos los derechos reservados. 1) Pricipales
cuestiones del an�lisis de trayectorias. Lee
esta secci�n. Esta
es la parte central del trabajo. Esta
secci�n es moderadamente dif�cil. Todas
las caracter�sticas de una suspensi�n dependen enteramente de la trayectoria de los sus componentes en relaci�n con el sistema de referencia
definido por los siguientes componentes: Manillar, sill�n, eje de pedalier,
los ejes de las dos ruedas, los anclajes del amortiguador y el freno trasero. Como
explicamos en la secci�n �Sistema de Referencia� Establecer un miembro del conjunto
como nuestro sistema no-inercial de referencia no quiere decir que no se mueva.
Puede desplazarse y girar pero el sistema de referencia lo seguir�. Los
componentes que hemos especificado siempre se mover�n a lo largo de una trayectoria,
o espacios unidimensionales en el sistema de referencia de uno de los miembros
de la bicicleta. La
tangente a la trayectoria determinar� el comportamiento de cualquier bicicleta
en un momento dado. La trayectoria determina el comportamiento a lo largo del
tiempo. Si
queremos comparar dos dise�os, deberemos de identificar una parte del conjunto
que sea com�n a los dos. Mientras mas se parezcan las trayectorias de los componentes,
mas parecido ser� el comportamiento de los dos dise�os. En la practica, el
manillar y el sill�n son los mejores puntos en los podemos fijar nuestro sistema
de referencia, y ser�n los que utilizaremos en el resto del trabajo. La
masa y su distribuci�n tienen un papel muy importante en cualquier mecanismo.
En cualquier caso, la masa del ciclista y del triangulo delantero suele ser
unas 60 veces superior a la de los miembros de la suspensi�n (Sin contar el
amortiguador). El movimiento de la masa del conjunto Ciclista/Triangulo Delantero
depender� de los movimientos de los componentes del triangulo delantero (Manillar,
eje de pedalier y sill�n), incluso si el eje de pedalier no estuviese en el
triangulo delantero. Adem�s, las diferencias entre los movimientos de una suspensi�n
de los distintos dise�os con unas trayectorias de los componentes parecidos
van a ser relativamente peque�as. Esto hace que las dos �nicas masas que se
deben tomar en cuenta para el an�lisis de un suspensi�n son las del terreno
y las del conjunto Ciclista/Triangulo Delantero. Estas
consideraciones sobre la masa son las que hacen posible el An�lisis de Trayectorias.
Ya hemos cubierto estas aproximaciones en la secci�n �Aproximaci�n.� del cap�tulo
II. En todo caso, cuando y como es posible realizar estas aproximaciones es
algo complicado y en la siguiente secci�n �Aproximaci�n de la masa.� Explicaremos
en detalle como estas Aproximaciones hacen posible el An�lisis de Trayectorias. Evidentemente,
cada persona dar� lugar a una distribuci�n de masas �nica. Cuando decimos que
podemos determinar el comportamiento de una suspensi�n a trav�s de las trayectorias,
queremos decir que conocemos el comportamiento para cada caso, en el que hemos
asumido unas caracte�isticas f�sicas tales como la distribuci�n de masas del
ciclista y la aportaci�n de la horquilla delantera. La
fricci�n en un mecanismo de una suspensi�n siempre va a actuar oponiendose al
movimiento, de los objetos a lo largo de su trayectoria, y al final se puede
considerar como una fuerza tangente a la trayectoria. En todos lo dise�os es
posible controlar la fricci�n que tiene el sistema. De este modo, aunque nosotros
consideramos que una cantidad de fricci�n es algo positivo, esto no va a suponer
una ventaja entre un tipo u otro de sistema de amortiguaci�n. Comentamos
tambi�n que las fuerzas entre los componentes son cr�ticas para determinar el
rendimiento de una suspensi�n. En cualquier caso, todas las l�neas de fuerza,
ya sean a trav�s del ciclista, de la cadena o externas pueden producirse en
cualquier sistema. Ellas no van
a distinguir entre un sistema u otro. Aun as�, es muy �til conocer como act�an
las fuerzas en una bicicleta. Esto
nos lleva a la conclusi�n de que la geometr�a es el aspecto mas influyente en
el rendimiento de una suspensi�n. En
la mayor�a de los casos no hace falta emplear todas las t�cnicas del An�lisis
de Trayectorias ya que las trayectorias de algunos componentes determinan la
orientaci�n de las estructuras que los soportan (Cuadro, horquilla, etc.). Por
ejemplo, el eje de pedalier y el sill�n bastan para determinar la posici�n del
triangulo delantero, as� que uno puede simplemente mirar ese objeto en vez de
al resto de los componentes acoplados a �l. En
algunos casos, por ejemplo en el dise�o de la GT I-Drive, no tenemos mas remedio
que emplear todos nuestros recursos para poder hacer un an�lisis. El an�lisis
de este dise�o con cualquier otro m�todo ser�a extremadamente complicado. El
poder de el m�todo de An�lisis de Trayectorias demostrar� en este caso la simplicidad
del dise�o I-Drive. El
an�lisis de la teor�a del sistema I-drive y la teor�a del sistema �ICT� de Ellsworth
se expondr�n al final de este trabajo. 2) Cuestiones
b�sicas. Lee
esta secci�n si: Si quieres verificar
por ti mismo la validez de las principales afirmaciones del An�lisis de Trayectorias
y entender los detalles de c�mo y porqu� funciona el metodo de An�lisis de Trayectorias. Saltate
esta secci�n si: Aceptas
las afirmaciones que realizamos acerca del An�lisis de Trayectorias y simplemente
te interesa utilizar el An�lisis de Trayectorias para sacar conclusiones acerca
de c�mo funciona una suspensi�n y hacer comparaciones entre distintos modelos. A) Aproximaci�n
a la masa. Como
dec�amos arriba: El
An�lisis de Trayectorias funciona porque la masa del ciclista y el triangulo
delantero son mucho mas importantes que las del resto de componentes. Adem�s,
las diferencias entre los movimientos de una suspensi�n de los distintos dise�os
con unas trayectorias de los componentes parecidos van a ser relativamente peque�as.
Esto hace que las dos �nicas masas que se deben tomar en cuenta para el an�lisis
de un suspensi�n son las del terreno y las del conjunto Ciclista/Triangulo Delantero. Adem�s,
todas las fuerzas en los miembros de la suspensi�n, aparte de las que act�an
directamente entre los miembros de la suspensi�n, los dirigidas a trav�s del
an�lisis de trayectorias de los componentes espec�ficos. Como la masa de los
miembros de la suspensi�n es despreciable, y estos miembros dirigen el movimiento
entre las dos masas que importan, es suficiente con considerar el An�lisis de
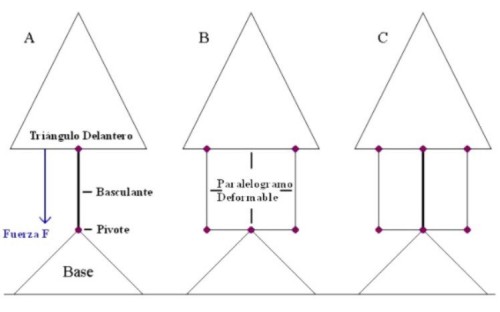
Trayectorias de estos componentes. Observemos
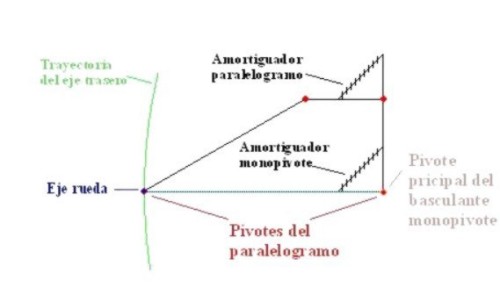
lo anterior de un manera mas detallada. En la Figura 3.1 A) tenemos un triangulo principal y un basculante
unidos a una base mediante un pivote. Este es actualmente un modelo adecuado
para estudiar la suspensi�n trasera de una bicicleta aunque se desprecian las
contribuciones de la horquilla delantera. Si calibramos la fuerza F para que
sea igual a la gravedad, tendr�amos pr�cticamente la misma situaci�n que en
una bicicleta de doble suspensi�n con un determinado desarrollo (nadie es capaz
de producir un valor tan grande, pero el valor puede ser reducido girando el
dibujo en la p�gina). Observamos como el triangulo principal s�lo puede moverse
a lo largo de una trayectoria en relaci�n con la base y el pivote inferior.
De la misma manera en que el eje de la rueda trasera de una bicicleta s�lo puede
moverse en una trayectoria en relaci�n con el triangulo delantero. {Hemos
dibujado los mecanismos de manera sim�trica y con unas articulaciones para formar
paralelogramos, pero el modelo se puede entender de una forma general, ya que
podr�amos haber elegido cualquier forma de triangulo delantero y cualquier longitud
en las barras. El modelo debe tambi�n considerarse en cualquier otra orientaci�n.} Figura
3.1 En
la figura 3.1 B) tenemos un triangulo delantero y un sistema de paralelogramo
deformable unido a la base mediante un pivote. Este sistema produce la misma
tractectoria que la figura 3.1 A), de hecho, si negamos la masa del basculante
y del paralelogramo tendremos la misma situaci�n en A y B. La
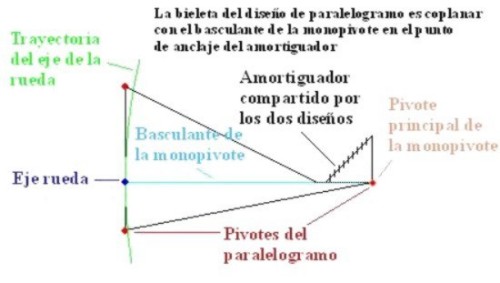
figura 3.1 C) muestra los dos sistemas aplicados a la vez en un mismo triangulo
delantero, como podemos ver los dos sistemas pueden trabajar juntos de forma
arm�nica. Esto
es un adelanto de una idea del autor a la que llamamos el modelo �Natural Mirror
Bike� y que veremos en una de las pr�ximas secciones. Ahora la pregunta que
debemos hacernos es: �Podemos
despreciar la masa de los miembros del basculante? Si
la masa del basculante trasero fuese bastante grande en comparaci�n con la masa
del tri�ngulo delantero y la masa del paralelogramo fuese muy peque�a, se podr�a
decir que no podemos aplicar el m�todo del an�lisis de trayectorias. En el caso
A) el tri�ngulo principal rotar�a alrededor del pivote superior, con un movimiento
relativamente peque�o del basculante al aplicar la fuerza F. En el caso B) el
tri�ngulo delantero y el paralelogramo se mover�an de forma distinta al del
caso A, el basculante se mover�a mucho mas, y el triangulo rotar�a mucho menos,
dando lugar a una situaci�n muy diferente. Pero este no es el caso de una bicicleta.
El
peso aproximado de un cuadro de suspensi�n es de aproximadamente tres kilos,
el basculante pesa aproximadamente un kilo y las diferencias entre los distintos
tipos de basculante no superan el medio kilo. Por otra parte el triangulo delantero
y el ciclista pueden pesar unos 70 kilos, como m�nimo. Esto quiere decir que
hay una diferencia menor del 0.5% entre los distintos tipos de mecanismos. A
esto hay que sumar que, el movimiento de la masa a lo largo del recorrido de
la suspensi�n depende en su mayor�a de los movimientos relativos entre las distintas
partes, dentro del rango de movimientos de todos los dise�os viables de doble
suspensi�n. Considerando los movimientos de los pivotes en un dise�o del tipo
paralelogramo, podemos ver que el movimiento de la masa es muy similar al que
ocurre en un dise�o monopivote. El movimiento de la masa del dise�o GT I-Drive
es muy similar al de un monopivote, siendo la �nica diferencia la rotaci�n del
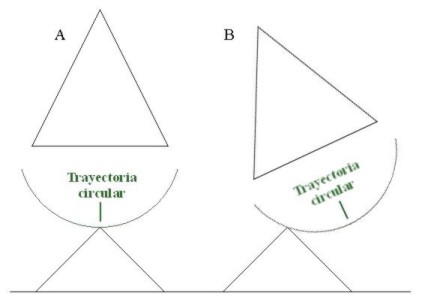
eje de pedalier en la exc�ntrica y el �Dog Bone�. Por
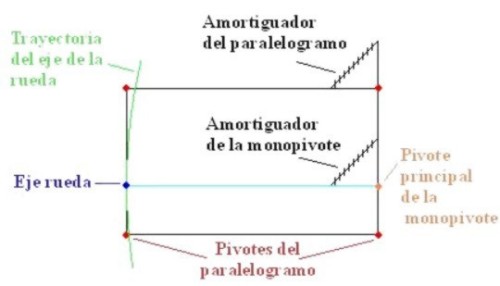
consiguiente, vamos a despreciar la masa del triangulo trasero y centrarnos
�nicamente en la trayectoria que este determina, tal y como hemos dibujado en
la figura 3.2 A) para los mecanismos que aparec�an en la figura 3.1). Aqu� hemos
dibujado una trayectoria circular del pivote inferior alrededor del pivote del
triangulo delantero. Esto contiene toda la informaci�n necesaria acerca de c�mo
funciona el mecanismo. La figura 3.2 B) nos muestra el tipo de movimiento que
permite este tipo de mecanismo u otro que sea equivalente. Figura
3.2 Hemos
demostrado estos principios comparando un dise�o Monopivote y uno de Paralelogramo
deformable o 4 Barras, pero se pueden aplicar a todos los dise�os en general
ya que el peso del triangulo trasero de cualquier dise�o es similar a los ejemplos
que hemos mostrado. B)
Fuerzas entre part�culas. El
rendimiento de una suspensi�n est� determinado por el movimiento relativo de
los componentes especificos que determinan el An�lisis de Trayectorias. Esto
se debe a que la conexi�n con el terreno (las ruedas) es la misma en todas las
bicicletas que vamos a comparar. Nosotros podremos basar completamente nuestro
an�lisis en estos movimientos internos del sistema y despreciar cualquier interacci�n
con elementos externos como el terreno. Esto facilitar� nuestro trabajo ya que
reduce el n�mero de grados de libertas de los componentes. Como
acabamos de decir, los componentes se mueven en espacios unidimensionales, es
decir, a trav�s de una trayectoria, asumiendo que el sistema de referencia est�
unido a uno de estos componentes. Como ser� el movimiento de cada elemento va
a depender de la suma de las fuerzas que trabajan entre este u el resto de componentes
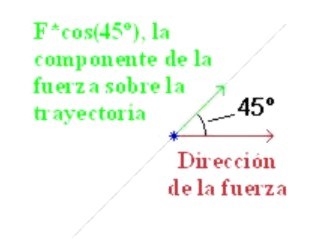
del sistema. Veamos un par de ejemplos para ver como se trabaja con estos objetos. Supongamos
un sistema de referencia de ejes x-y, un objeto, por ejemplo una bola,
tiene limitado su movimiento a la diagonal del primer cuadrante. Ahora
supongamos que existe una fuerza en la direcci�n que tira del objeto. Las ecuaciones
de movimiento de la part�cula tendr�n en cuenta la proyecci�n de la fuerza sobre
su trayectoria F*cos
(45�),
y no considerar�n las que afectan al mecanismo que limita sus grados de libertad.
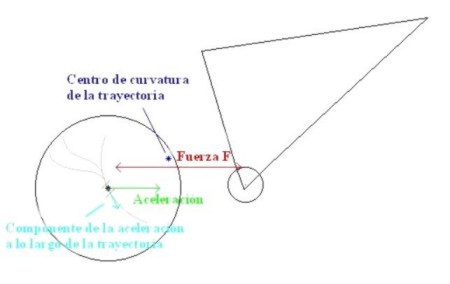
La figura 3.3 nos muestra la part�cula la fuerza y su proyecci�n sobre la trayectoria. Figura
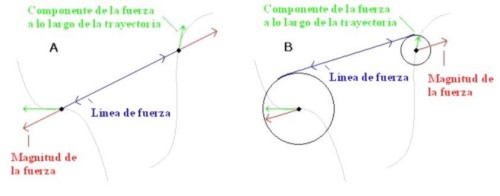
3.3 Dos
part�culas pueden moverse en una trayectoria en relaci�n con la otra. Si aplicamos
una fuerza entre las dos, esto provocar� una aceleraci�n de las dos part�culas
en la direcci�n de la tangente a la trayectoria del punto en el que se aplica
la fuerza. La figura 3.4 Ilustra esta situaci�n. Figura
3.4 En
el siguiente ejemplo tenemos dos ruedas con sus respectivos ejes limitados a
moverse a lo largo de la misma trayectoria que aparece en la figura A, con los
ejes en las mismas posiciones. La fuerza que ejercemos sobre las ruedas tambi�n
es la misma que en A. La figura 3.4 B) muestra esta situaci�n. Hay
que notar que las fuerzas en los ejes tienen la misma direcci�n que la fuerza
entre las dos ruedas, que es diferente a la que aparece en la figura A. Las
fuerzas son de distinta magnitud debido a los distintos momentos de inercia
de cada rueda. Es particularmente importante el hecho de que las fuerzas en
los ejes no son colineares. Las componentes de la fuerza en B tienen la misma
direcci�n que las de A pero la magnitud va a ser diferente debido a las diferencias
en la direcci�n de la fuerza y la diferentes magnitudes en los ejes. Consideremos
ahora una part�cula, por ejemplo el eje de una rueda, con un movimiento restringido
a una trayectoria respecto a otro objeto, por ejemplo un triangulo delantero.
Las fuerzas que ejercen los otros componentes en este eje, independientemente
de c�mo se transmitan, tender�n a mover el eje de la rueda en la direcci�n que
se corresponda con la proyecci�n sobre tangente de la resultante de todas las
fuerzas. La magnitud de la proyecci�n de esta fuerza determina el movimiento
del eje. Consideraciones similares existen en el resto de los componentes. Si
la trayectoria de un componente en un mecanismo es una funci�n de otra trayectoria,
entonces no tiene importancia como se consigue esta relaci�n. Cualquier mecanismo
va a dar como resultado el mismo comportamiento f�sico. Un ejemplo de esta relaci�n
funcional es la posici�n del eje de pedalier, manillar y sill�n cuando definen
el triangulo delantero. Una situaci�n similar se da en el dise�o GT I-Drive. Como
resultado podemos decir que, para conocer el rendimiento de cualquier dise�o
de suspensi�n que no sea una trasera unificada, solo necesitamos examinar la
trayectoria del eje trasero, de los anclajes del amortiguador y la posici�n
del freno trasero respecto al triangulo delantero. La
figura 3.5 nos muestra el recorrido (hay varias posibilidades) de un eje trasero
respecto al triangulo delantero. Las l�neas grises representan distintas posibilidades
en la trayectoria del eje trasero. La l�nea roja representa una l�nea fuerza
(de la cadena). La flecha verde es la reacci�n en el eje trasero. La flecha
de color celeste es la proyecci�n de esta fuerza sobre la tangente a la trayectoria. Figura
3.5 ***
Este
es uno de los puntos centrales. En la peque�a regi�n delimitada por las l�neas
naranjas todas las trayectorias son id�nticas. Por encima de esta zona todas
son diferentes, una sigue siendo circular y el resto tiene curvaturas mas extremas.
Hemos dibujado esto para enfatizar que lo que importa es la tangente en cada
momento. Lo que ocurra en otras posiciones no influye en lo que sucede entre
las l�neas naranjas, nuestra regi�n de estudio. En peque�as regiones de la
trayectoria de un punto, todos los dise�os con una trayectoria parecida, en
general, se comportan de un modo
similar. En particular, todos se comportan como un dise�o monopivote. Cuando
la regi�n tiende a cero la tangente a la trayectoria determina el comportamiento
de la suspensi�n en cualquier punto del recorrido.*** Esto
puede parecer extra�o cuando consideramos varios dise�os con un radio de curvatura
muy diferente. Pero recuerda, es lo que sucede cuando las suspensiones avanzan
en su recorrido (desde el punto en el que ten�an la misma tangente) lo que hace
que al final el comportamiento sea diferente. Grandes
diferencias en la curvatura crear�n un cambio r�pido de comportamiento. El
siguiente ejemplo vamos a estudiar algunas cuestiones acerca de si la informaci�n
que nos aporta la tangente es suficientemente completa sin tener en cuenta el
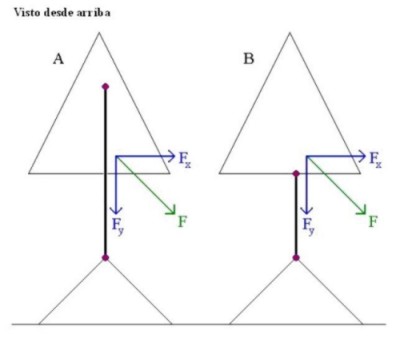
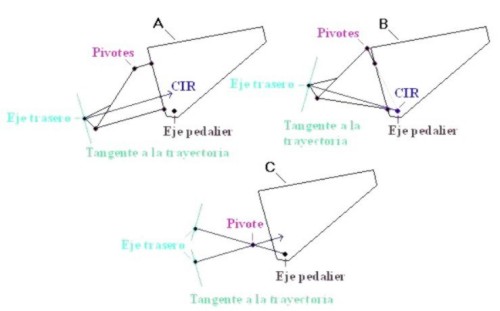
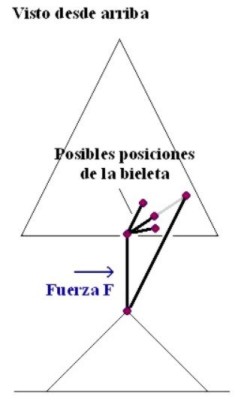
radio de curvatura. Las
figuras 3.6 A y B muestran dos tri�ngulos delanteros conectados por un basculante
de distinta longitud a una base. Las trayectorias que producen estos basculantes
son diferentes entre si pero la tangente inicial es la misma en los dos casos.
Representemos los mecanismos como si fuesen horizontales y vistos desde arriba
as� que debemos de empezar en equilibrio antes de aplicar la fuerza F al triangulo
delantero. Figura
3.6 La
fuerza F puede aplicarse en cualquier punto y en cualquier direcci�n. Hemos
elegido una posici�n intermedia respecto a los puntos de pivote de cada caso
ya que esta posici�n es la que puede crear alguna diferencia de comportamiento. Despreciando
la masa del basculante vemos como la componente y de F, Fy va a producir
la misma reacci�n en los dos casos ya que es perpendicular al basculante. Tambi�n
vemos que la componente X de la fuerza,
Fx, tiene el mismo brazo de palanca respecto al pivote inferior
(el de la base) por lo que va a producir el mismo movimiento en el momento inicial
pero esto cambia a medida que la suspensi�n se comprime. En el momento inicial
sin embargo, el comportamiento es el mismo. Un
basculante de las dimensiones que aparecen en la figura 3.6 A ser�a mas pesado
que el del caso B, pero esta diferencia seguir�a siendo peque�a comparada con
el peso del conjunto Triangulo delantero/Ciclista y adem�s en la realidad no
vamos a encontrar ese tipo de basculantes.
Los dise�os de paralelogramo deformable que pueden conseguir una trayectoria
similar a la de la figura A no tienen porque ser mas pesados y adem�s todas
las masas tienden a moverse de la misma manera. As� que, como hab�amos dicho
antes, despreciar la masa del tri�ngulo trasero es un buen m�todo de an�lisis. 3)El
modelo �Natural Mirror Bike�. Lee
esta secci�n. T�cnicamente
es una secci�n sencilla y el concepto del �Natural Mirror Bike� es la manera
mas sencilla de comprender la v�lidez del m�todo de An�lisis de Trayectorias
(AT). La confirmaci�n
mas intuitiva del AT ser�a un ejemplo en el que una bicicleta tiene dos sistemas
de suspensi�n al mismo tiempo. Estos dos sistemas generan la mistra trayectoria
de la rueda y no interfieren entre s�. Despu�s de publicar esta idea, el autor
recibi� un mensaje en el que describ�an un ejemplo mas sencillo de entender.
Este dise�o tendr�a un sistema de suspensi�n diferente en cada lado del tri�ngulo
trasero. A este tipo de dise�o lo llamaremos
�Natural Mirror� ya que la verdadera naturaleza de cada suspensi�n est�
reflejada en el otro lado. En el an�lisis
de cada dise�o podemos estudiar la trayectoria de todos los componentes, o simplemente
estudiar uno e ignorar el resto. Podemos estudiar la trayectoria del eje trasero
por ejemplo, sin preocuparnos de si los anclajes del amortiguador son iguales
o no. Para evaluar
la validez de una teor�a, los f�sicos suelen examinar algunos casos �obvios�
para ver si la teor�a tiene sentido. Aqu� vamos a examinar varios sistemas con
trayectorias circulares para demostrar que tienen el mismo comportamiento respecto
al pedaleo. Vamos a suponer
que en un lado de nuestro dise�o existe un sistema de paralelogramo deformable
en el que la bieleta superior es paralela a la vaina y de la misma longuitud
(muy parecido al sistema Lawwill.) Llamaremos a este dise�o �4 Barras Paralelas�.
La trayectoria del eje ser� circular (aqu� no influye que la articulaci�n trasera
est� en las vainas o en los tirantes). En el otro lado
de la bicicleta utilizaremos un sistema monopivote con la articulaci�n principal
a la misma altura que el del pivote inferior del sistema de 4 Barras Paralelas.
Llamaremos a este dise�o de bicicleta �Paralelo/Monopivote Mirror� ya que los
dos lados producen la misma trayectoria. Podr�amos incluso
conseguir el mismo comportamiento de amortiguaci�n colocando los anclajes del
amortiguador en el mismo punto de las v�inas de cada lado. De esta manera la
trayectoria de los puntos de anclaje ser� id�ntica. La figura 3.7 nos muestra
esta situaci�n. Figura
3.7 Consideremos
ahora otro tipo de dise�o de paralelogramo. Esta vez vamos a hacer que los dos
pivotes delanteros del lado del paralelogramo sean coaxiales. Los pivotes est�n
f�sicamente unidos al tri�ngulo delantero por lo que sigue siendo un dise�o
de paralelogramo deformable. El eje de la rueda en este caso sigue siendo circular
y la suspensi�n puede analizarse de igual modo desde un lado u otro. La figura
3.8 muestra este ejemplo. Figura
3.8 Por
�ltimo, consideremos un dise�o de paralelogramo deformable en el que el eje
de la rueda trasera se coloca de forma coaxial con la articulaci�n trasera.
No importa si la rueda est� anclada f�sicamente a las v�inas o a los tirantes
ya que el comportamiento va a ser el mismo, ya que en los dos casos la trayectoria
es la misma. La configuraci�n de la bieleta superior solo va a influir en la
progresividad del amortiguador pero no en la trayectoria del eje ni en el comportamiento
de la bici ante el pedaleo. De todas formas siempre ser�a posible ajustar la
colocaci�n de los amortiguadores para que el comportamiento fuese id�ntico en
todos los aspectos. La
figura 3.9 nos muestra este mecanismo. Figura
3.9 Todos
estos ejemplos tan diferentes entre s�, funcionan de manera id�ntica entre s�
cuando consideramos la interacci�n con el pedaleo ya que la trayectoria del
eje de la rueda trasera es circular en todos los casos. (Dejamos aparte la frenada
y la progresividad del amortiguador en el �ltimo caso.) 4) Trayectorias
y rendimiento de la suspensi�n. Lee
esta secci�n. Esta
secci�n explica las consideraciones mas importantes de la mayor�a de cuadros
de doble suspensi�n que se fabrican hoy en d�a. Esta
secci�n no es muy dif�cil, salvo en un par de pasos tal vez, y puede ser de
gran utilidad para el consumidor. {Un
comentario: Los tri�ngulos delanteros de los dibujos no est�n representados
a escala y las trayectorias no proponen una soluci�n concreta para un dise�o
real ni tampoco tienen la intenci�n de analizar y dar publicidad a un dise�o-
Est�n construidos con intenciones meramente ilustrativas.} Antes
de empezar a analizar las trayectorias vamos a a comentar algunos asuntos. La
mayor�a de dise�os de suspensi�n (Monopivotes, Multipivotes, etc.) Pueden llegar
a ser tan ligeras o r�gidas como cualquier otra. Ejemplos de ambos casos han
tenido �xito tanto en Rally como en Descenso. Los dos tipos pueden conseguir
la misma rigidez lateral sin que una sea mas pesada que la otra. Los
dise�os monopivote son un poco mas simples, pero hoy en d�a
los de paralelogramo deformable tambi�n son muy fiables. Algunos
de los dise�os de paralelogramo deformable permiten variaciones de geometr�a
y de recorrido. Los dise�os monopivote no suelen construirse con esta caracter�stica,
aunque ser�a posible construirlos. A) Trayectorias
en Monopivotes y en sistemas de Paralelogramo Deformable. Las
trayectorias de un Sistema de Paralelogramo Deformable se pueden desviar de
un trayectoria circular de tres maneras distintas: Primero,
La trayectoria de un dise�o Monopivote siempre ser� circular respecto al pivote
principal. Los dise�os de Paralelogramo Deformable pueden tener un radio de
curvatura variable. La forma mas f�cil de entender esto es viendo la figura
3.10 A. Dibujamos una circunferencia por el punto de pivote trasero desde el
punto de pivote de la bieleta a medida que la suspensi�n se comprime. Lo siguiente,
consideramos la trayectoria del pivote inferior trasero a mismo tiempo que el
superior va siguiendo su recorrido. Este pivote trasero se mueve hacia atr�s
y adelante escribiendo una trayectoria circular. Vemos como la trayectoria de
los puntos del tirante trasero son circulares respecto al pivote que hay junto
al eje de pedalier cuando est�n cerca del pivote inferior trasero (Horst Link)
y circulares respecto al pivote superior cuando est�n cerca de la bieleta. Las
trayectorias van cambiando de un modo progresivo desde un punto al otro. El
eje trasero, montado en un lugar entre estos dos puntos tiene una trayectoria
con curvatura variable. Figura
3.10 Un
dise�o monopivote podr�a conseguir un radio de curvatura menor si el pivote
principal pasase a estar en las vainas (Ya ser�an dos pivotes, por lo tanto
mas complejo). Nosotros hemos propuesto anteriormente este tipo de dise�o y
lo llamamos �Split Monopivot�. Este dise�o es t�cnicamente viable y tendr�a
la ventaja de tener un pivote mas estable. La figura 3.10 C muestra esta curvatura
tan peque�a. Nosotros no consideramos que el radio de curvatura peque�o sea
una ventaja inherente a los dise�os de Paralelogramo deformable ya que en teor�a
el dise�o de Monopivote �Split� tambi�n puede conseguirla, aunque en la actualidad
no existe ning�n dise�o de este tipo en el mercado. La
teor�a de este tipo de dise�o es la que motiv� a Cannondale a fabricar su nuevo
dise�o para competici�n, la Cannondale Scalpel. Los
dise�os de 4 Barras pueden conseguir una trayectoria con un radio de curvatura
peque�o centrado dentro del di�metro de la rueda trasera, Las figuras 3.10 A
y B nos muestran un ejemplo. En este ejemplo, que b�sicamente es igual que la
Giant NRS el objetivo se consigue gracias a un dise�o que Baja el Centro de
Rotaci�n Instant�neo a medida que la suspensi�n se comprime. Tercero,
un dise�o monopivote siempre tendr� el pivote principal dentro del tri�ngulo
delantero. Existen ejemplos de dise�os de paralelogramo deformable con trayectorias
muy abiertas en las que el punto de pivote virtual estar�a por delante del tri�ngulo
delantero, cosa que tampoco puede hacerse con un dise�o monopivote. Un ejemplo
ser�a la Schwinn Rocket. -Absorci�n
del amortiguador (situaci�n de no pedaleo). Vamos
a considerar en este apartado el comportamiento de la suspensi�n cuando dejamos
de dar pedales, La interferencia con el pedaleo o con la frenada se estudiar�n
en sus apartados correspondientes. La
suspensi�n de una bicicleta puede ser comprimida s�bitamente debido a un obst�culo,
una roca por ejemplo, o por la
ca�da desde una plataforma elevada. En general, creemos que una trayectoria
con un radio de curvatura amplio y una orientaci�n hacia arriba y ligeramente
hacia atr�s es la mejor soluci�n. Los dise�os con un radio de curvatura peque�o,
tales como la Giant NRS y la Cannondale Scalpel son inferiores el el apartado
de absorci�n de baches (Aunque decimos otra vez, que la Scalpel no tiene suficiente
recorrido como para que esto sea un problema). En
el caso de saltar un cortado, la situaci�n es obvia, una trayectoria lineal
ofrece una absorci�n mas suave y consistente. En
el caso de un obst�culo, la fuerza inicial ser� hacia arriba y hacia atr�s por
lo que la tangente inicial de la trayectoria debe de ser la misma pero a medida
que la bicicleta empieza a superar el obst�culo esa fuerza empieza a ser mas
vertical as� que una trayectoria suavemente curvada hacia arriba es la soluci�n
ideal. La
experimentaci�n debe determinar cual es la inclinaci�n y el radio de curvatura
ideal. Los
radios de amortiguaci�n tipo �Rising� benefician a las suspensiones con recorridos
cortos porque permiten una buena sensibilidad inicial y evitan que la suspensi�n
haga tope de forma violenta. - Contaminaci�n
con el pedaleo. (En traseras no unificadas). Un
dise�o de Trasera No Unificada normalmente quiere decir que el eje de pedalier
est� en el triangulo delantero. Este dise�o domina el mercado hoy en d�a y la
mayor�a son monopivotes o sistemas de paralelogramo deformable. Aqu� examinamos
el pedaleo pregunt�ndonos si �existen m�ritos de un sistema frente al otro en
relaci�n con el pedaleo y en ese caso, �cuales son las consideraciones que se
han tenido en cuenta. Hemos
observado en la figura 3.5 de la secci�n �Fuerzas entre particulas.� Que la
tangente a la trayectoria de los componentes determinan el comportamiento de
la suspensi�n en un momento determinado. Esto
significa que, si eliminamos la fricci�n del mecanismo, cada dise�o tiene una
combinaci�n ideal de Plato y Pi��n en la que el rendimiento es m�ximo y mientras
mas nos alejemos de esta combinaci�n mayor ser� la contaminaci�n de la suspensi�n
con el pedaleo. Para
una desviaci�n dada de la combinaci�n ideal, el radio de compresi�n del amortiguador
determinar� en movimiento de la suspensi�n. Las suspensiones con recorridos
cortos tienden a ser menos reactivas frente al pedaleo que las suspensiones
con recorridos mas largos, esto se debe a que las suspensiones de recorridos
cortos suelen tener un radio de suspensi�n mas alto y mas Progresivo (Rising
rate). En cualquier caso las diferencias entre un radio de suspensi�n lineal
y otro de tipo Rising es peque�a en en tramo de recorrido en que se suele pedalear
y en la practica los radios de suspensi�n es estas regiones son una funci�n
del recorrido total. La
mayor�a de los cuadros se complementan bien con sus amortiguadores de serie,
y todos los tipos de dise�os pueden tener los radios de suspensi�n mas comunes,
el lineal y el de tipo Rising. As� que este tema solo va a tener importancia
para aquellos que desean cambiar el tipo de amortiguador de serie. Como
el radio de la suspensi�n en las regiones donde se produce el pedaleo es principalmente
una funci�n del recorrido total podremos obviarlo para el estudio en este apartado.
El que est� interesado en el tema puede acudir a la secci�n �Relaci�n de velocidad
de la suspensi�n.� del Cap�tulo II. Cualquier
comentario sobre el rendimiento de un dise�o debe de hacerse teniendo en cuenta
la horquilla que se va a utilizar. Al igual que ocurr�a con la distribuci�n
de masas del ciclista. Debemos asumir un tipo de horquilla antes de empezar
a estudiar un caso concreto. Adem�s, todos los ejes de pedalier est�n a una
altura est�ndar del suelo que var�a entre 13" �
0.5" Pulgadas. Por lo tanto, el eje trasero y la altura del pedalier determinan
la orientaci�n del cuadro respecto al suelo. Despu�s de comentar la horquilla
que estamos utilizando es posible despreciar la trayectoria de la rueda delantera
en nuestro estudio. [Si alguien no est� satisfecho con esta simplificaci�n puede
considerar la trayectoria de la rueda delantera, �sta y la de la rueda trasera
determinar�n la orientaci�n del cuadro respecto al suelo. (De nuevo habr� que
asumir una longitud de la horquilla delantera.)]. Vemos
entonces como el rendimiento del pedaleo de cualquier dise�o de Trasera No Unificada
est� determinado por la trayectoria del eje trasero (Teniendo en cuenta su longitud,
lo que a su vez nos da la idea de la influencia del radio de suspensi�n del
dise�o.) Por
lo tanto, el An�lisis de Trayectorias puede ser algo muy simple para algunos
tipos de dise�os y algunos tipos de an�lisis. Esta versi�n simplificada se conoce
y ha sido utilizada por los fabricantes de bicicletas desde hace alg�n tiempo. Dado
que cualquier tipo de dise�o puede conseguir cualquier tangente en la trayectoria
del eje de la rueda, la diferencia la marca la forma en que esa tangente evoluciona
a lo largo de la trayectoria. Ahora
examinaremos la viabilidad o no de las trayectorias con curvaturas variables
y las diferencias entre radios de curvatura grandes y peque�os. Primero
vamos a considerar cual es la trayectoria ideal que minimiza la contaminaci�n
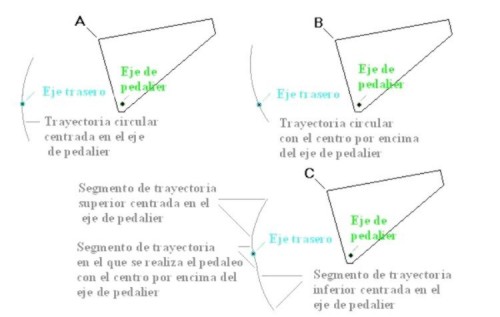
con el pedaleo. Para
mayor facilidad vamos a suponer un desarrollo 1-1. Con esta combinaci�n la suspensi�n
no va a producir una reacci�n hacia atr�s de los pedales. Si tenemos una trayectoria
circular centrada en el eje de pedalier la distancia entre el eje de pedalier
y el eje de la rueda trasera permanece constante. (Si el desarrollo es mayor
la distancia tendr�a que aumentar para eliminar la contaminaci�n en el pedaleo.)
La figura 3.11 A muestra este tipo de trayectoria. Figura
3.11 Continuando
con el ejemplo de un desarrollo 1-1: Para evitar el hundimiento debido a la
aceleraci�n y un peque�o efecto de compresi�n debido a la cadena en el punto
de equilibrio, la tangente de la trayectoria debe de estar ligeramente inclinada
hacia detr�s. Con este tipo de trayectoria la fuerza de la cadena elimina el
movimiento debido a los cambios de ritmo. La figura 3.11 B muestra esta situaci�n
manteniendo una trayectoria circular pero a cambio de esta caracter�stica tendremos
una reacci�n en los pedales cuando la suspensi�n encuentre un gran obst�culo.
La
importancia de esta reacci�n ha sido debatida muchas veces. Ciertamente el problema
aparece cuando nos alejamos en exceso de la combinaci�n ideal pero hay que se
claros en este punto, Si se quiere tener una suspensi�n que no se mueva al pedalear
tambi�n vamos a tener esa reacci�n en los pedales, por mucho que los fabricantes
se empe�en en decir lo contrario. La
mayor�a de los ciclistas experimentados dan una gran importancia al estilo de
pedaleo, un pedaleo �redondo� que permite minimizar el grado de inactividad
de la suspensi�n. La figura 3.11 C muestra un tipo de trayectoria que combina
lo mejor de ambos casos en un solo dise�o. En la regi�n en la que pedaleamos
existe un crecimiento en la longitud de la cadena para minimizar el movimiento
de la suspensi�n pero por encima y por debajo de esta zona la trayectoria se
vuelve mas �vertical�, es decir, no existe crecimiento en la longitud de la
cadena y el movimiento de la suspensi�n no interfiere con los pedales. Para
muchos esta ser�a la situaci�n ideal. En
principio, un dise�o de paralelogramo deformable puede conseguir una trayectoria
similar a este �Ideal� gracias a la posibilidad de tener una curvatura variable
que se reduce a medida que la suspensi�n
se comprime. Es imposible que la trayectoria sea completamente igual
que la que aparece en la figura pero es lo mas parecido que podemos conseguir.
Esto permitir�a una suspensi�n con poco movimiento en la zona de pedaleo pero
con menos reacci�n sobre los pedales antes impactos fuertes que un dise�o monopivote. Vemos
como en principio algunas trayectorias de curvatura variable ofrecen una ventaja
en el apartado de contaminaci�n con el pedaleo. En
la secci�n correspondiente del cap�tulo cuarto examinaremos dos dise�os capaces
de crear una trayectoria de curvatura variable con forma de �S� que en la regi�n
de equilibrio es tambi�n muy similar a la que aparece el la figura 3.11 C. Por
el momento el �nico dise�o que ha conseguido esto es el de Outland. Un
dise�o con una trayectoria muy cerrada debe de ser regulado con �Cero SAG� ya
que para conseguir un buen comportamiento por encima del punto de equilibrio
la trayectoria aumenta mucho la longitud de las vainas en los primeros cent�metros
de recorrido y esto puede generar un movimiento y una perdida de energ�a indeseada.
La Giant NRS, la Cannondale Scalpel y el �Split Monopivot� explicado anteriormente
(pero que no est� en el cat�logo de ninguna compa��a) son ejemplos de dise�os
con una curvatura de trayectoria muy corta. La Cannondale no tiene demasiado
recorrido como para apreciar las ventajas que esto supone pero eso es otro tema
de debate. Las
trayectorias con un radio de curvatura muy amplio no aportan ninguna ventaja
en lo referente al pedaleo ya que no ofrecen tangentes �especiales� y no resuelven
el dilema entre el poco movimiento de la suspensi�n gracias al aumento de longitud
de las vainas y su contraparte, la reacci�n hacia atr�s en los pedales cuando
encontramos un obst�culo. Hay
personas que aceptan la reacci�n en los pedales a cambio de una suspensi�n que
no se mueva durante el pedaleo. Para estas personas las trayectorias muy abiertas
pueden ser la soluci�n pero nosotros creemos que esta no es una soluci�n aceptable.
Las reacciones en los pedales de grandes obst�culos afectan de forma muy negativa
al ciclista que ademas en estos casos suele encontrarse de pie, lo que crea
una situacion de pedaleo no convencional en la que el hundimiento no debe de
tomarse en cuenta. -
Compromisos. Ya
hemos visto como una trayectoria ligeramente hacia atr�s en el punto de equilibrio
debe ofrecer una mayor eficacia de pedaleo y una buena absorci�n cuando dejamos
de pedalear. Y tambi�n como esto produce una reacci�n en los pedales cuando
pedaleamos sobre una zona bacheada. Muchos ciclistas dicen tener una gran sensibilidad
ante este efecto y notan un peque�o cambio de menos de una pulgada en la colocaci�n
de los pivotes. Unos prefieren trayectorias que proporcionan una mayor eficacia
mientras que otros prefieren las que proporcionan comodidad as� que nos encontramos
ante un dilema que nos exige tomar una decisi�n. Tambi�n
hemos hecho notar que los dise�os con un radio de curvatura peque�o por encima
del equilibrio, ya sean de trayectoria circular o variable, tienen la ventaja
de reducir la reacci�n hacia atr�s de los pedales a medida que se avanza en
el recorrido pero para que esta caracter�stica se apreciable el radio de curvatura
debe de ser muy reducido y esto supone un inconveniente en el apartado de la
absorci�n de obst�culos. El ejemplo mas conocido dentro de este tipo de dise�os
es el de la Giant NRS. Los
dise�os que emplean una trayectoria de curvatura variable, como es el caso del
dise�o VPP tienen un compromiso entre el peso y la rigidez del tri�ngulo trasero,
puesto que la colocaci�n de los pivotes tan cerca del eje de pedalier hace necesario
reforzarlos mas que en dise�os mas convencionales. Esto demuestra que todos
los dise�os tienen sus compromisos (al que adem�s habr� que sumarle el compromiso
a la hora de elegir el tipo de trayectoria). Esto
nos lleva a una de las ideas centrales que revisaremos a lo largo del trabajo,
no existen �trayectorias ideales� ni tampoco existen �puntos m�gicos� en los
que colocar los pivotes. Ya
hemos visto este asunto en el apartado de la distribuci�n de masas de los distintos
tipos de ciclistas. Hemos
visto el hecho de que ninguna geometr�a puede ser completamente neutral ante
el pedaleo, sin la ayuda de la fricci�n. Y ahora volvemos a ver que debemos
tomar decisiones, en funci�n de las preferencias de cada uno. Los
seres humanos podemos ser extremadamente sensibles a peque�os cambios f�sicos.
Este autor ha comprobado por ejemplo, que una diferencia de solo dos mil�metros
en la altura del sill�n puede cambiar por completo la sensaci�n sobre la bicicleta.
Por eso no nos sorprende que algunas personas consideren tan importante las
peque�as diferencias en la posici�n de los pivotes, y entendemos que tienen
raz�n. En
todo caso, tambi�n hemos visto casos de personas que afirmaban haber encontrado
un dise�o �Perfecto� , estas declaraciones coinciden �casualmente� con las realizadas
por el fabricante a trav�s de los medios de comunicaci�n (No es el caso de este
autor, y tampoco suele ser el de los ciclistas mas experimentados). Nosotros
no creemos que existan los dise�os �Perfectos�, as� que la conclusi�n que sacamos
es que, o existen factores psicol�gicos que impiden el razonamiento, o tal vez
algunas personas no son capaces de apreciar las diferencias de las que hablamos,
seguramente ser� un poco de los dos casos. Todo
esto nos lleva a cuestiones filos�ficas en el tema del rendimiento de la suspensi�n.
As� que para poder continuar con otro tema , volvemos a recomendar la propia
experimentaci�n mediante pruebas de bicicletas como el mejor medio de conocer
que tipo de caracter�sticas son las que somos capaces de distinguir y decidir
si son las que deseamos para nosotros mismos. Al
final, ning�n dise�o se muestra superior al resto. En la vida real hay mucha
gente completamente feliz con su dise�o monopivote, y tambi�n mucha gente completamente
feliz con su dise�o de paralelogramo deformable. Eso pr�cticamente lo dice todo. -Frenada. Uno
de los mayores debates que existen en el apartado de la frenada es el de si
un dise�o de paralelogramo deformable se comporta mejor que un Monopivote. Mas
adelante, en la secci�n �Interacci�n entre frenada y amortiguaci�n.� Del cap�tulo
V , estudiaremos las teor�as que existen sobre al respecto. Aqu� examinaremos
las diferencias de comportamiento entre un dise�o Paralelogramo Deformable y
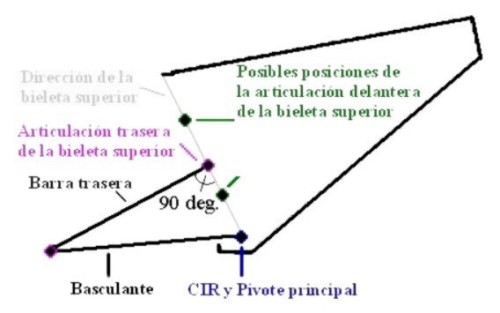
un Monopivote con la articulaci�n principal en la misma situaci�n. La
figura 3.12 nos muestra un cuadro con una suspensi�n del tipo paralelogramo
deformable con varias posibilidades de colocaci�n de la articulaci�n de la bieleta
que producen un Centro de Rotaci�n Instant�neo que coincide con la articulaci�n
principal. El An�lisis de Trayectorias nos demuestra que este dise�o se comportar�
de manera id�ntica a un dise�o monopivote, en ese momento concreto ya que la
tangente a la trayectoria de lo frenos es la misma para ambos casos. Figura
3.12 Esto
se entiende mejor si consideramos los dos tipos de dise�os parte de una misma
�Mirror Bike�. En ese momento concreto las tangentes de las trayectorias de
los componentes son esencialmente las
mismas. Al no existir movimiento en el Horst Link las trayectorias del basculante
y del tri�ngulo trasero del dise�o monopivote van a ser las mismas. En
la figura 3.12 hemos dibujado las articulaciones de la bieleta y la trasera
con un �ngulo de 90 grados entre si para que visualmente fuese mas f�cil de
entender pero cualquier dise�o de paralelogramo deformable con un CIR que coincida
con el pivote principal se comporta de la misma manera que un monopivote. Para
ver esto con mas claridad observamos la figura 3.13. Aqu� hemos representado
un dise�o del tipo Paralelogramo Deformable con varias posibilidades para los
pivotes de la bieleta, unido a una base y orientado horizontalmente. Todas las
fuerzas son id�nticas en los dos dise�os en una situaci�n de frenada salvo las
que existen entre el eje de la rueda, los frenos y los componentes de la suspensi�n.
Montando el cuadro horizontalmente podemos estudiar estas fuerzas por separado.
Figura
3.13
Cuando
frenamos, una fuerza F es inducida desde la rueda trasera al basculante trasero
a traves del freno. Si ignoramos la masa de la bieleta, la cual es muy peque�a,
vemos que esta fuerza se transmite primero a la bieleta y finalmente al tri�ngulo
delantero. Directamente por debajo del eje de la bieleta. Para
ver esto puede ayudar el considerar las fuerzas implicadas entre el tri�ngulo
delantero y los miembros de la suspensi�n como hicimos en la figura 3.6. Descomponemos
la fuerza a trav�s del pivote superior trasero de la bieleta en fuerzas paralelas
y perpendiculares a la bieleta. Y hacemos lo mismo para las fuerzas entre la
bieleta y el tri�ngulo delantero. Vemos
como la suma de momentos en el pivote principal de este dise�o (En el que el
CIR coincide con el pivote) es la misma que la del dise�o Monopivote. Tambi�n
vemos como un dise�o con el CIR por delante del pivote principal tendr� un comportamiento
que extiende la suspensi�n al frenar mas de lo que lo har�a un dise�o monopivote
(Este efecto tambi�n es conocido como �Brake-Jack�), ya que la suspensi�n se
comprime el eje trasero asciende mas que en un dise�o Monopivote con la articulaci�n
principal colocada en la misma posici�n. Un
ICR por detr�s del pivote principal da lugar a una mayor compresi�n del amortiguador
en el momento de la frenada. Hemos
realizado numerosos experimentos con bicicletas del tipo Monopivotes que muestran
que estos dise�os son bastante independientes respecto a la frenada. Para ambos,
Monopivotes y dise�os de paralelogramo deformable con el CIR coaxial con el
pivote principal los efectos sobre el triangulo delantero son los mismos a lo
largo de una frenada sobre una superficie lisa. La
mayor�a de los dise�os de paralelogramo deformable tienen el CIR por delante
del pivote principal lo que las hace extenderse durante la frenada en superficies
lisas. Hemos comprobado una ligera extensi�n en los experimentos realizados
con una Intense Tracer, un dise�o muy popular (En todo caso, en la practica
la Intense Tracer frena sin problemas en los caminos). Interesante,
este tipo de extensi�n puede hacer llegar al tope de extensi�n a bicis de recorrido
corto que est�n dise�adas para poco SAG, podr�a ser el caso de la Giant NRS,
por lo que la fuerza producida por un obst�culo tendr�a que superar a ala anterior
para que la suspensi�n empezar� a trabajar. Algunos
dise�os de Paralelogramo deformable como por ejemplo las Jamis Dakars y las
Psycle Werks Wild Hare con un CIR muy pr�ximo al pivote principal se comportan
de manera similar a un dise�o monopivote. La
Yeti AS-R, con un CIR por detr�s del pivote principal se comporta de manera
compresiva en comparaci�n con una Monopivote en circunstancias de frenada sobre
superficies lisas. Cuando
un dise�o de paralelogramo deformable frena al mismo tiempo que absorbe un obst�culo
el CIR cambia de posici�n y por lo tanto tambi�n var�a el comportamiento ante
la frenada. Si la bieleta gira en el sentido de las agujas del reloj (la bieleta
apunta hacia arriba) el movimiento de la suspensi�n hace que sea mas compresiva.
En el caso de que la bieleta apunte hacia abajo, es decir, gire en direcci�n
contraria a las agujas del reloj el movimiento de la suspensi�n hace que la
suspensi�n tienda a extenderse un poco mas que en la posici�n inicial. Este
efecto es menor en el caso de que bielas y bieleta formen un �ngulo de 90 Grados
en el momoento inicial ya que el CIR avanza muy poco y el comportamiento sigue
siendo similar al de un dise�o monopivote. Este es de nuevo el caso de
las Jamis Dakars y las Psycle Werks Wild Hare. Espero
que todos hall�is encontrado este trabajo entretenido y que pod�is aplicarlo
en una futura compra. Un saludo y Happy Trails. Ken Sasagi.
|