
Electric motor
Electric motors consist of two mechanical parts a stator, or stationary part, and a rotor, or revolving part and two sets of electrical windings the field and the armature. Electromagnetic fields set up across the air gap between the stator and rotor interact with each other and produce the torque, or turning force, that rotates the motor. The power output is the product of the torque and rotational speed. A motor is classified as DC (direct current) or AC (alternating current), depending on its power source.
Induction motors
Are the most widely used AC motors. The field winding is generally wound into slots spaced around the iron stator to form magnetic poles. A revolving electric field is set up in the stator windings and induces currents in the rotor windings. The interaction between these two fields produces the torque to turn the motor. The motor's speed varies depending on the load.
Synchronous motors
Synchronous motors operate at a fixed speed regardless of the load. Single-phase hysteresis motors are used in small constant-speed devices, such as electric clocks and phonographs. The stator windings match those of the induction motor. The field source is provided either by direct current or by a permanent magnetic material.
DC motors
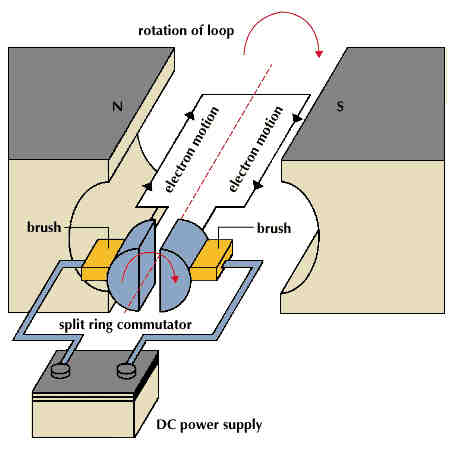
provide torque and speed control at a lower cost than AC units and are mechanically more complex. The pole field winding on the stator is composed of magnetic poles, each with many turns carrying a small current. The armature winding is placed on the rotor with the ends of each coil connected to opposite bars. As the rotor turns, the specific coil carrying the current changes, but its relative location to the stationary field remains fixed.
Common commutator motors have generator features in reverse. They can be of the armature-and-fixed-field type, or they can consist of a rotor and a stator. The field coils of the motor can be series wound, shunt wound, or compound wound. A series winding builds up field strength rapidly when the motor starts under load. In fact, the field may build up too rapidly. This can be avoided by using a starting box to increase the supply of current by steps as the motor gains speed. A shunt winding has advantages once a motor is running at operating speed. A compound winding combines both types. The motor uses the series winding at the start, and an automatic control switches to the shunt when heavy pulling is no longer needed to gain operating speed.
In an induction motor, a magnetic field revolves around a piece of metal and creates eddy currents in the metal. These currents produce magnetic fields that interact with the revolving field. This makes the metal rotate if it is pivoted properly. The rotating metal constitutes a motor. The smallest motors of this type use a rotor made of metal disks notched at the edges to place the eddy currents properly. Larger types may use a squirrel-cage rotor. This is made of metal bars arranged to form a skeleton cylinder. The ends of the bars may be attached to disks, or the bars may be mounted on a cylinder of enameled iron and connected at the ends. The eddy currents flow through the bars and end connections.
The revolving fields are produced by using two-phase or three-phase current to energize the field coils. Because different-phase currents can be used, induction motors are classified as polyphase. The phases of the current amount to different alternating currents (AC) in the same circuit. The currents reach maximum and minimum strengths in each direction of flow at different times. The field coils are connected to place maximums at different points in turn around a circle. This produces the revolving field.
Synchronous motors are like a rotor-stator alternator in reverse. A polyphase current provides revolving fields in the stator, and other current (sometimes direct) gives the rotor a field that follows the stator fields around. Such motors run at constant speeds.
Go Back




